 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLaserNet: An Efficient Probabilistic 3D Object Detector for Autonomous Driving
Paper and Code
Mar 20, 2019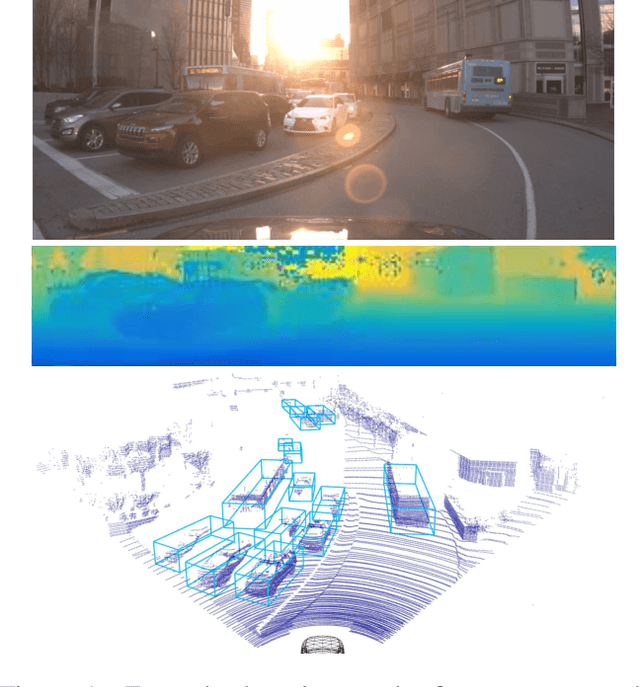

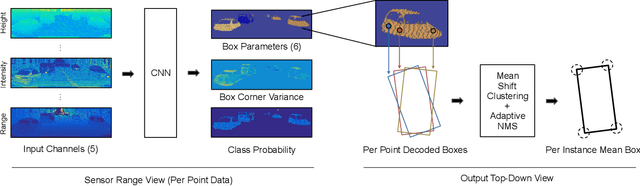
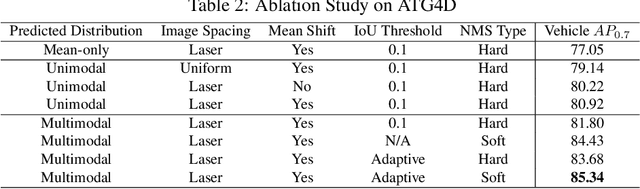
In this paper, we present LaserNet, a computationally efficient method for 3D object detection from LiDAR data for autonomous driving. The efficiency results from processing LiDAR data in the native range view of the sensor, where the input data is naturally compact. Operating in the range view involves well known challenges for learning, including occlusion and scale variation, but it also provides contextual information based on how the sensor data was captured. Our approach uses a fully convolutional network to predict a multimodal distribution over 3D boxes for each point and then it efficiently fuses these distributions to generate a prediction for each object. Experiments show that modeling each detection as a distribution rather than a single deterministic box leads to better overall detection performance. Benchmark results show that this approach has significantly lower runtime than other recent detectors and that it achieves state-of-the-art performance when compared on a large dataset that has enough data to overcome the challenges of training on the range view.