 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLASER: LAtent SpacE Rendering for 2D Visual Localization
Paper and Code
Apr 01, 2022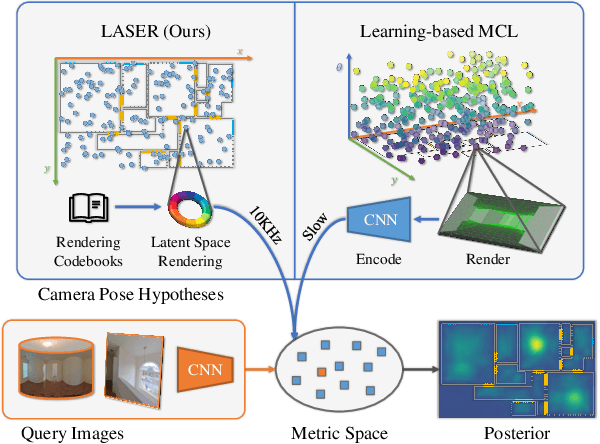
We present LASER, an image-based Monte Carlo Localization (MCL) framework for 2D floor maps. LASER introduces the concept of latent space rendering, where 2D pose hypotheses on the floor map are directly rendered into a geometrically-structured latent space by aggregating viewing ray features. Through a tightly coupled rendering codebook scheme, the viewing ray features are dynamically determined at rendering-time based on their geometries (i.e. length, incident-angle), endowing our representation with view-dependent fine-grain variability. Our codebook scheme effectively disentangles feature encoding from rendering, allowing the latent space rendering to run at speeds above 10KHz. Moreover, through metric learning, our geometrically-structured latent space is common to both pose hypotheses and query images with arbitrary field of views. As a result, LASER achieves state-of-the-art performance on large-scale indoor localization datasets (i.e. ZInD and Structured3D) for both panorama and perspective image queries, while significantly outperforming existing learning-based methods in speed.