 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLABRAD-OR: Lightweight Memory Scene Graphs for Accurate Bimodal Reasoning in Dynamic Operating Rooms
Paper and Code
Mar 23, 2023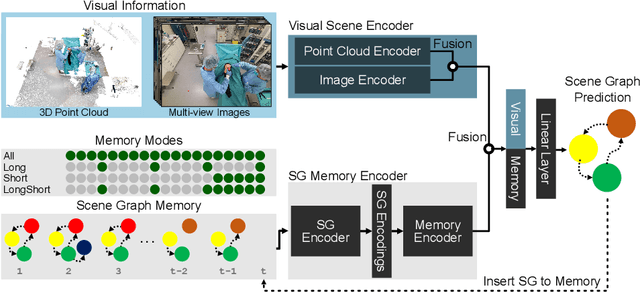

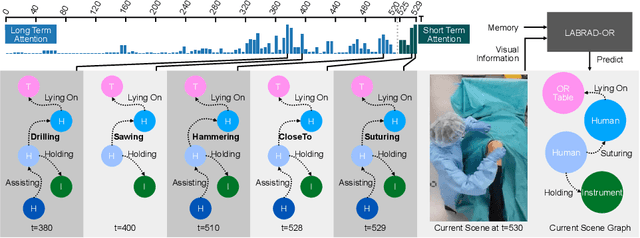
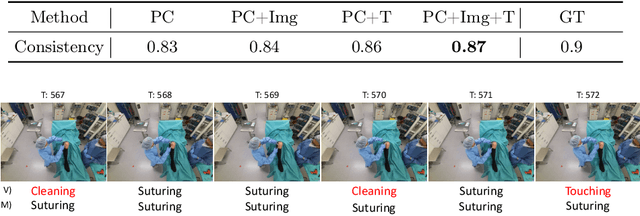
Modern surgeries are performed in complex and dynamic settings, including ever-changing interactions between medical staff, patients, and equipment. The holistic modeling of the operating room (OR) is, therefore, a challenging but essential task, with the potential to optimize the performance of surgical teams and aid in developing new surgical technologies to improve patient outcomes. The holistic representation of surgical scenes as semantic scene graphs (SGG), where entities are represented as nodes and relations between them as edges, is a promising direction for fine-grained semantic OR understanding. We propose, for the first time, the use of temporal information for more accurate and consistent holistic OR modeling. Specifically, we introduce memory scene graphs, where the scene graphs of previous time steps act as the temporal representation guiding the current prediction. We design an end-to-end architecture that intelligently fuses the temporal information of our lightweight memory scene graphs with the visual information from point clouds and images. We evaluate our method on the 4D-OR dataset and demonstrate that integrating temporality leads to more accurate and consistent results achieving an +5% increase and a new SOTA of 0.88 in macro F1. This work opens the path for representing the entire surgery history with memory scene graphs and improves the holistic understanding in the OR. Introducing scene graphs as memory representations can offer a valuable tool for many temporal understanding tasks.