 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeL-SNet: from Region Localization to Scale Invariant Medical Image Segmentation
Paper and Code
Feb 11, 2021
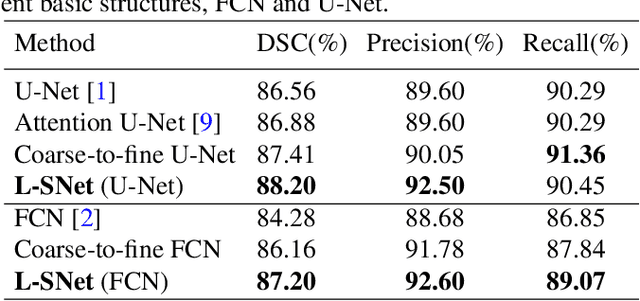
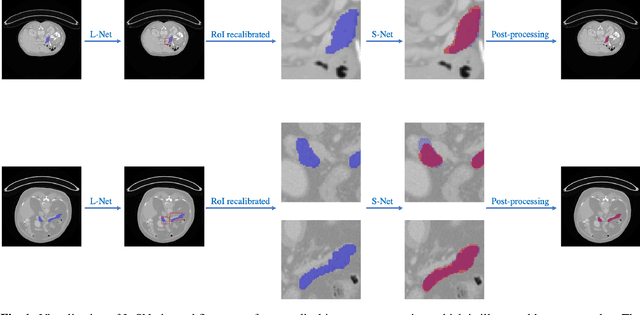

Coarse-to-fine models and cascade segmentation architectures are widely adopted to solve the problem of large scale variations in medical image segmentation. However, those methods have two primary limitations: the first-stage segmentation becomes a performance bottleneck; the lack of overall differentiability makes the training process of two stages asynchronous and inconsistent. In this paper, we propose a differentiable two-stage network architecture to tackle these problems. In the first stage, a localization network (L-Net) locates Regions of Interest (RoIs) in a detection fashion; in the second stage, a segmentation network (S-Net) performs fine segmentation on the recalibrated RoIs; a RoI recalibration module between L-Net and S-Net eliminating the inconsistencies. Experimental results on the public dataset show that our method outperforms state-of-the-art coarse-to-fine models with negligible computation overheads.