 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeKnowledge-Grounded Reinforcement Learning
Paper and Code
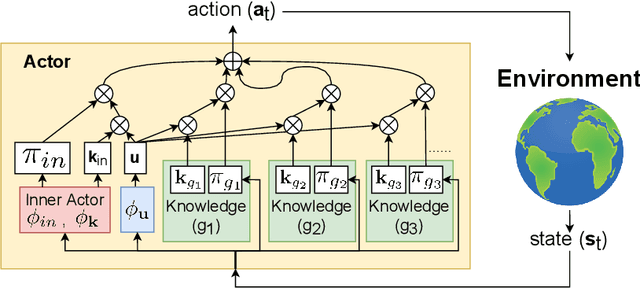

Receiving knowledge, abiding by laws, and being aware of regulations are common behaviors in human society. Bearing in mind that reinforcement learning (RL) algorithms benefit from mimicking humanity, in this work, we propose that an RL agent can act on external guidance in both its learning process and model deployment, making the agent more socially acceptable. We introduce the concept, Knowledge-Grounded RL (KGRL), with a formal definition that an agent learns to follow external guidelines and develop its own policy. Moving towards the goal of KGRL, we propose a novel actor model with an embedding-based attention mechanism that can attend to either a learnable internal policy or external knowledge. The proposed method is orthogonal to training algorithms, and the external knowledge can be flexibly recomposed, rearranged, and reused in both training and inference stages. Through experiments on tasks with discrete and continuous action space, our KGRL agent is shown to be more sample efficient and generalizable, and it has flexibly rearrangeable knowledge embeddings and interpretable behaviors.