 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeKnowledge Distillation for 6D Pose Estimation by Keypoint Distribution Alignment
Paper and Code
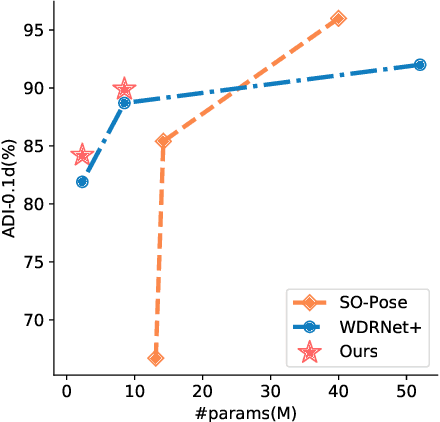
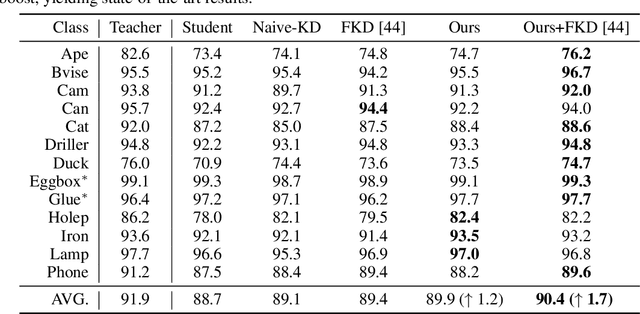
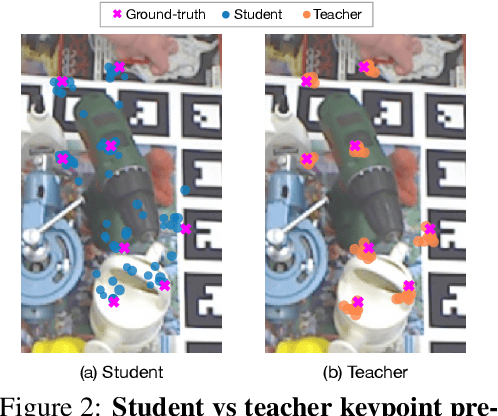
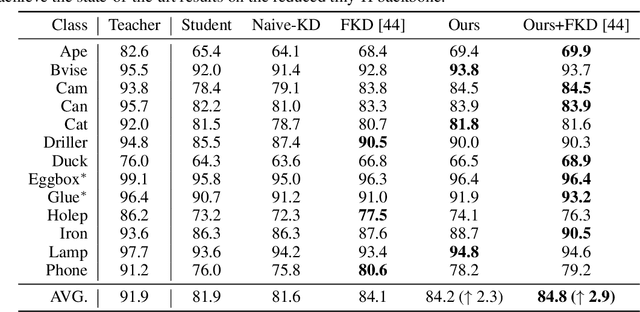
Knowledge distillation facilitates the training of a compact student network by using a deep teacher one. While this has achieved great success in many tasks, it remains completely unstudied for image-based 6D object pose estimation. In this work, we introduce the first knowledge distillation method for 6D pose estimation. Specifically, we follow a standard approach to 6D pose estimation, consisting of predicting the 2D image locations of object keypoints. In this context, we observe the compact student network to struggle predicting precise 2D keypoint locations. Therefore, to address this, instead of training the student with keypoint-to-keypoint supervision, we introduce a strategy based the optimal transport theory that distills the teacher's keypoint \emph{distribution} into the student network, facilitating its training. Our experiments on several benchmarks show that our distillation method yields state-of-the-art results with different compact student models.