 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeKL-Divergence-Based Region Proposal Network for Object Detection
Paper and Code

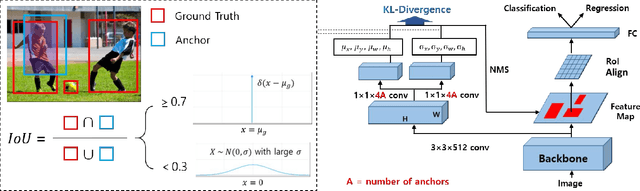

The learning of the region proposal in object detection using the deep neural networks (DNN) is divided into two tasks: binary classification and bounding box regression task. However, traditional RPN (Region Proposal Network) defines these two tasks as different problems, and they are trained independently. In this paper, we propose a new region proposal learning method that considers the bounding box offset's uncertainty in the objectness score. Our method redefines RPN to a problem of minimizing the KL-divergence, difference between the two probability distributions. We applied KL-RPN, which performs region proposal using KL-Divergence, to the existing two-stage object detection framework and showed that it can improve the performance of the existing method. Experiments show that it achieves 2.6% and 2.0% AP improvements on MS COCO test-dev in Faster R-CNN with VGG-16 and R-FCN with ResNet-101 backbone, respectively.