 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeK-level Reasoning for Zero-Shot Coordination in Hanabi
Paper and Code
Jul 14, 2022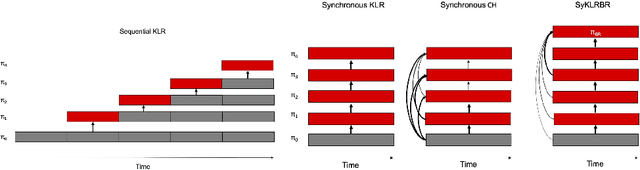
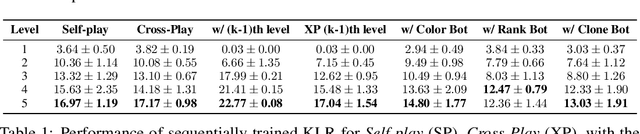

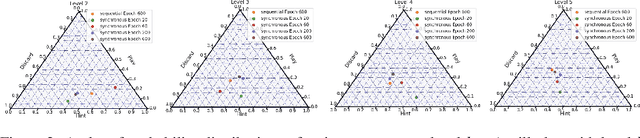
The standard problem setting in cooperative multi-agent settings is self-play (SP), where the goal is to train a team of agents that works well together. However, optimal SP policies commonly contain arbitrary conventions ("handshakes") and are not compatible with other, independently trained agents or humans. This latter desiderata was recently formalized by Hu et al. 2020 as the zero-shot coordination (ZSC) setting and partially addressed with their Other-Play (OP) algorithm, which showed improved ZSC and human-AI performance in the card game Hanabi. OP assumes access to the symmetries of the environment and prevents agents from breaking these in a mutually incompatible way during training. However, as the authors point out, discovering symmetries for a given environment is a computationally hard problem. Instead, we show that through a simple adaption of k-level reasoning (KLR) Costa Gomes et al. 2006, synchronously training all levels, we can obtain competitive ZSC and ad-hoc teamplay performance in Hanabi, including when paired with a human-like proxy bot. We also introduce a new method, synchronous-k-level reasoning with a best response (SyKLRBR), which further improves performance on our synchronous KLR by co-training a best response.