 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeJRDB-Traj: A Dataset and Benchmark for Trajectory Forecasting in Crowds
Paper and Code
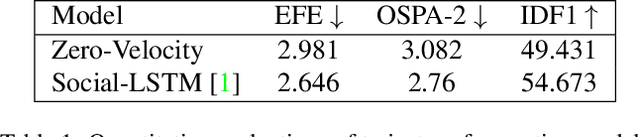
Predicting future trajectories is critical in autonomous navigation, especially in preventing accidents involving humans, where a predictive agent's ability to anticipate in advance is of utmost importance. Trajectory forecasting models, employed in fields such as robotics, autonomous vehicles, and navigation, face challenges in real-world scenarios, often due to the isolation of model components. To address this, we introduce a novel dataset for end-to-end trajectory forecasting, facilitating the evaluation of models in scenarios involving less-than-ideal preceding modules such as tracking. This dataset, an extension of the JRDB dataset, provides comprehensive data, including the locations of all agents, scene images, and point clouds, all from the robot's perspective. The objective is to predict the future positions of agents relative to the robot using raw sensory input data. It bridges the gap between isolated models and practical applications, promoting a deeper understanding of navigation dynamics. Additionally, we introduce a novel metric for assessing trajectory forecasting models in real-world scenarios where ground-truth identities are inaccessible, addressing issues related to undetected or over-detected agents. Researchers are encouraged to use our benchmark for model evaluation and benchmarking.