 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeIt's Time to Play Safe: Shield Synthesis for Timed Systems
Paper and Code
Jun 30, 2020
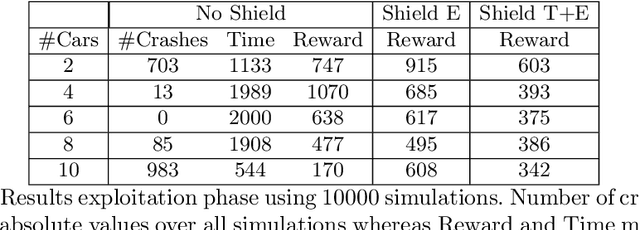
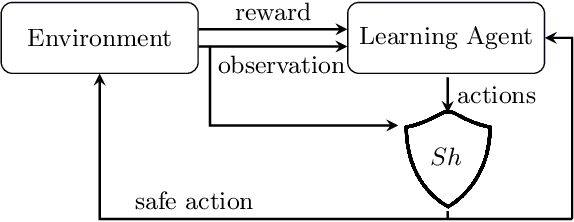
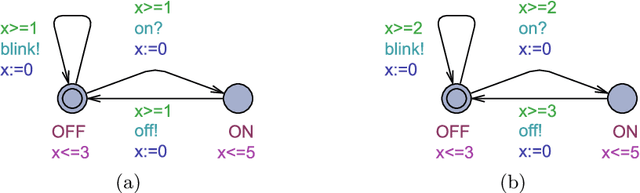
Erroneous behaviour in safety critical real-time systems may inflict serious consequences. In this paper, we show how to synthesize timed shields from timed safety properties given as timed automata. A timed shield enforces the safety of a running system while interfering with the system as little as possible. We present timed post-shields and timed pre-shields. A timed pre-shield is placed before the system and provides a set of safe outputs. This set restricts the choices of the system. A timed post-shield is implemented after the system. It monitors the system and corrects the system's output only if necessary. We further extend the timed post-shield construction to provide a guarantee on the recovery phase, i.e., the time between a specification violation and the point at which full control can be handed back to the system. In our experimental results, we use timed post-shields to ensure the safety in a reinforcement learning setting for controlling a platoon of cars, during the learning and execution phase, and study the effect.