 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeIs Q-learning Provably Efficient?
Paper and Code
Jul 10, 2018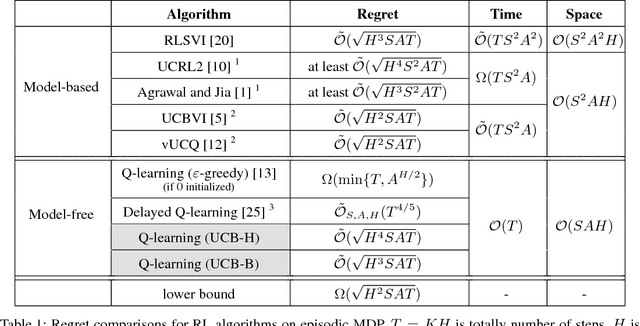
Model-free reinforcement learning (RL) algorithms, such as Q-learning, directly parameterize and update value functions or policies without explicitly modeling the environment. They are typically simpler, more flexible to use, and thus more prevalent in modern deep RL than model-based approaches. However, empirical work has suggested that model-free algorithms may require more samples to learn [Deisenroth and Rasmussen 2011, Schulman et al. 2015]. The theoretical question of "whether model-free algorithms can be made sample efficient" is one of the most fundamental questions in RL, and remains unsolved even in the basic scenario with finitely many states and actions. We prove that, in an episodic MDP setting, Q-learning with UCB exploration achieves regret $\tilde{O}(\sqrt{H^3 SAT})$, where $S$ and $A$ are the numbers of states and actions, $H$ is the number of steps per episode, and $T$ is the total number of steps. This sample efficiency matches the optimal regret that can be achieved by any model-based approach, up to a single $\sqrt{H}$ factor. To the best of our knowledge, this is the first analysis in the model-free setting that establishes $\sqrt{T}$ regret without requiring access to a "simulator."