 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeIntuitive Physics Guided Exploration for Sample Efficient Sim2real Transfer
Paper and Code
Apr 18, 2021
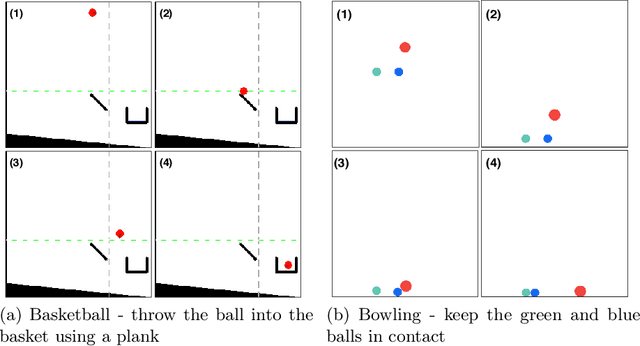

Physics-based reinforcement learning tasks can benefit from simplified physics simulators as they potentially allow near-optimal policies to be learned in simulation. However, such simulators require the latent factors (e.g. mass, friction coefficient etc.) of the associated objects and other environment-specific factors (e.g. wind speed, air density etc.) to be accurately specified, without which, it could take considerable additional learning effort to adapt the learned simulation policy to the real environment. As such a complete specification can be impractical, in this paper, we instead, focus on learning task-specific estimates of latent factors which allow the approximation of real world trajectories in an ideal simulation environment. Specifically, we propose two new concepts: a) action grouping - the idea that certain types of actions are closely associated with the estimation of certain latent factors, and; b) partial grounding - the idea that simulation of task-specific dynamics may not need precise estimation of all the latent factors. We first introduce intuitive action groupings based on human physics knowledge and experience, which is then used to design novel strategies for interacting with the real environment. Next, we describe how prior knowledge of a task in a given environment can be used to extract the relative importance of different latent factors, and how this can be used to inform partial grounding, which enables efficient learning of the task in any arbitrary environment. We demonstrate our approach in a range of physics based tasks, and show that it achieves superior performance relative to other baselines, using only a limited number of real-world interactions.