 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeIntentionNet: Map-Lite Visual Navigation at the Kilometre Scale
Paper and Code
Jul 03, 2024
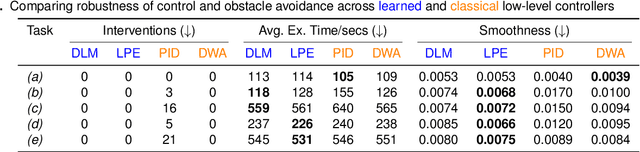
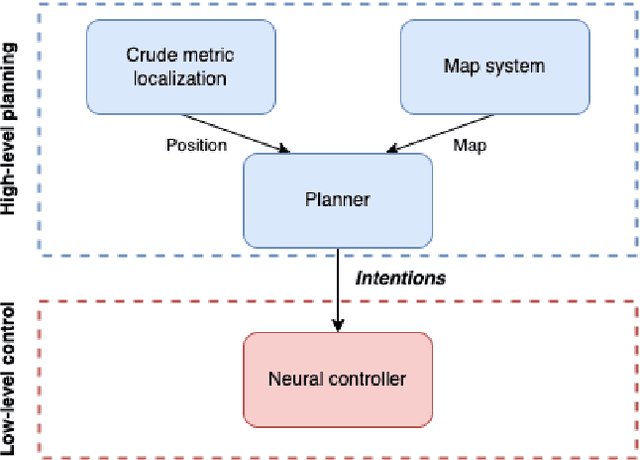
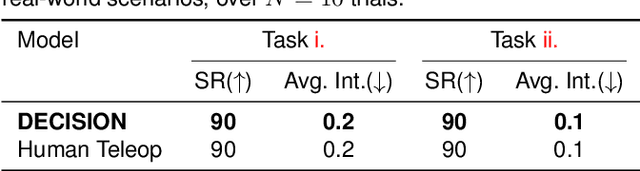
This work explores the challenges of creating a scalable and robust robot navigation system that can traverse both indoor and outdoor environments to reach distant goals. We propose a navigation system architecture called IntentionNet that employs a monolithic neural network as the low-level planner/controller, and uses a general interface that we call intentions to steer the controller. The paper proposes two types of intentions, Local Path and Environment (LPE) and Discretised Local Move (DLM), and shows that DLM is robust to significant metric positioning and mapping errors. The paper also presents Kilo-IntentionNet, an instance of the IntentionNet system using the DLM intention that is deployed on a Boston Dynamics Spot robot, and which successfully navigates through complex indoor and outdoor environments over distances of up to a kilometre with only noisy odometry.