 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeIntelligent upper-limb exoskeleton using deep learning to predict human intention for sensory-feedback augmentation
Paper and Code
Sep 09, 2023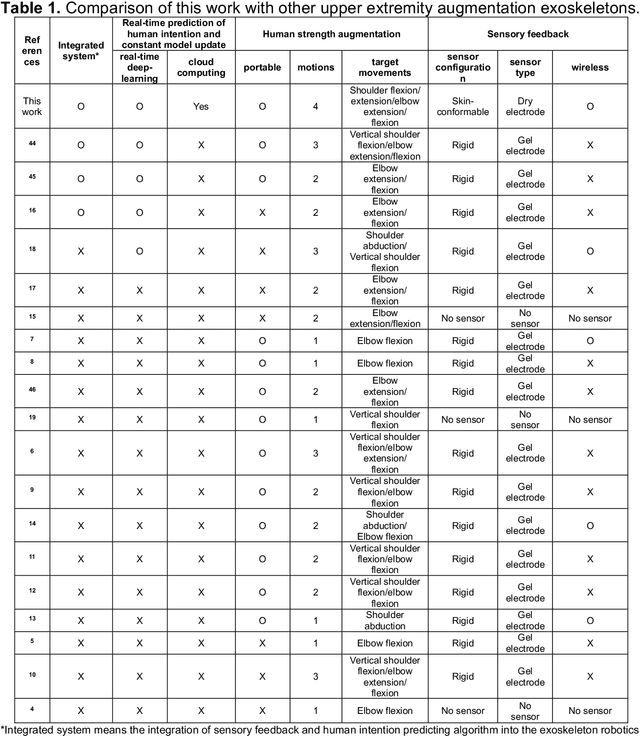
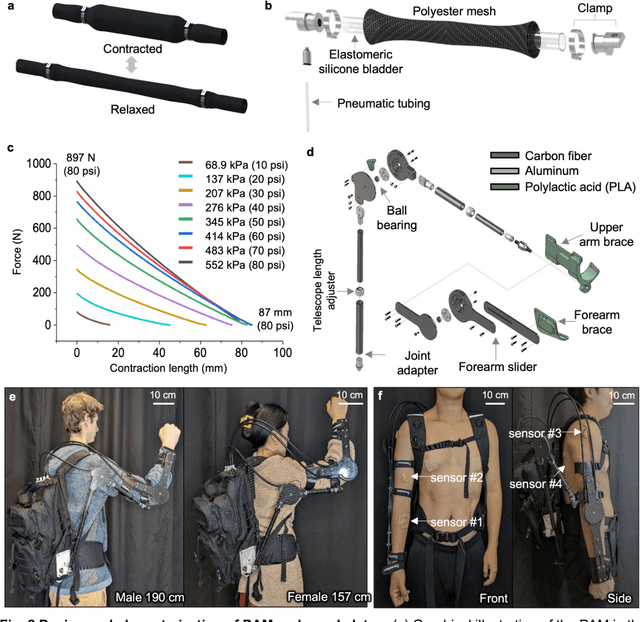
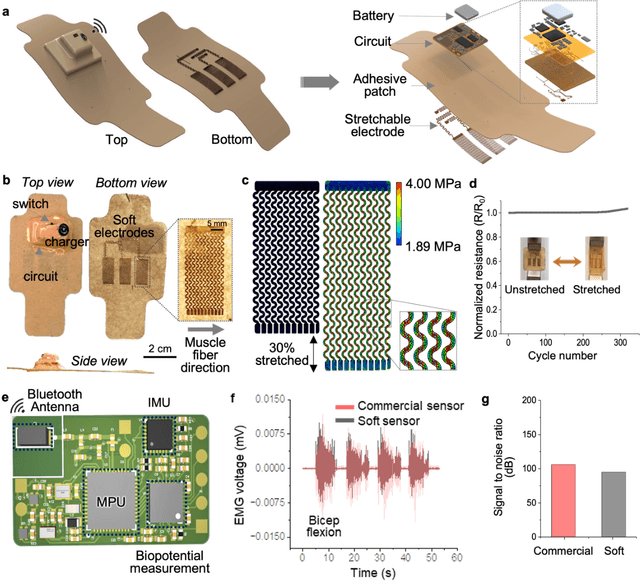
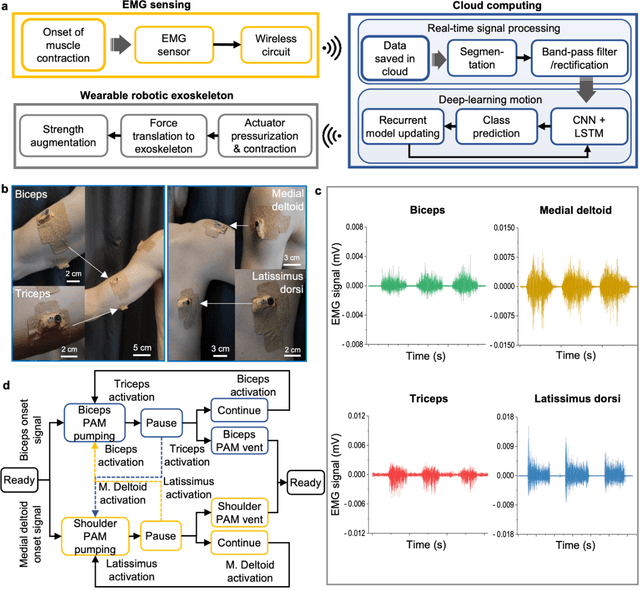
The age and stroke-associated decline in musculoskeletal strength degrades the ability to perform daily human tasks using the upper extremities. Although there are a few examples of exoskeletons, they need manual operations due to the absence of sensor feedback and no intention prediction of movements. Here, we introduce an intelligent upper-limb exoskeleton system that uses cloud-based deep learning to predict human intention for strength augmentation. The embedded soft wearable sensors provide sensory feedback by collecting real-time muscle signals, which are simultaneously computed to determine the user's intended movement. The cloud-based deep-learning predicts four upper-limb joint motions with an average accuracy of 96.2% at a 200-250 millisecond response rate, suggesting that the exoskeleton operates just by human intention. In addition, an array of soft pneumatics assists the intended movements by providing 897 newton of force and 78.7 millimeter of displacement at maximum. Collectively, the intent-driven exoskeleton can augment human strength by 5.15 times on average compared to the unassisted exoskeleton. This report demonstrates an exoskeleton robot that augments the upper-limb joint movements by human intention based on a machine-learning cloud computing and sensory feedback.