 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeIntelligent Traffic Light via Policy-based Deep Reinforcement Learning
Paper and Code
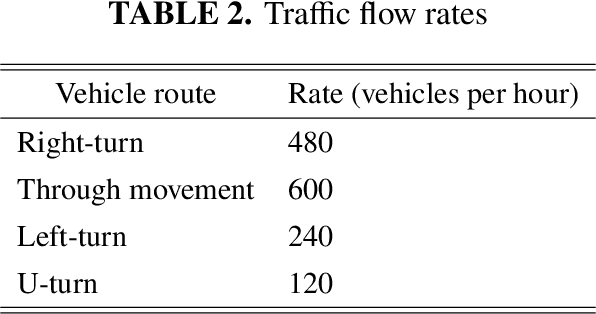
Intelligent traffic lights in smart cities can optimally reduce traffic congestion. In this study, we employ reinforcement learning to train the control agent of a traffic light on a simulator of urban mobility. As a difference from existing works, a policy-based deep reinforcement learning method, Proximal Policy Optimization (PPO), is utilized other than value-based methods such as Deep Q Network (DQN) and Double DQN (DDQN). At first, the obtained optimal policy from PPO is compared to those from DQN and DDQN. It is found that the policy from PPO performs better than the others. Next, instead of the fixed-interval traffic light phases, we adopt the light phases with variable time intervals, which result in a better policy to pass the traffic flow. Then, the effects of environment and action disturbances are studied to demonstrate the learning-based controller is robust. At last, we consider unbalanced traffic flows and find that an intelligent traffic light can perform moderately well for the unbalanced traffic scenarios, although it learns the optimal policy from the balanced traffic scenarios only.