 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeINSTA-BEEER: Explicit Error Estimation and Refinement for Fast and Accurate Unseen Object Instance Segmentation
Paper and Code
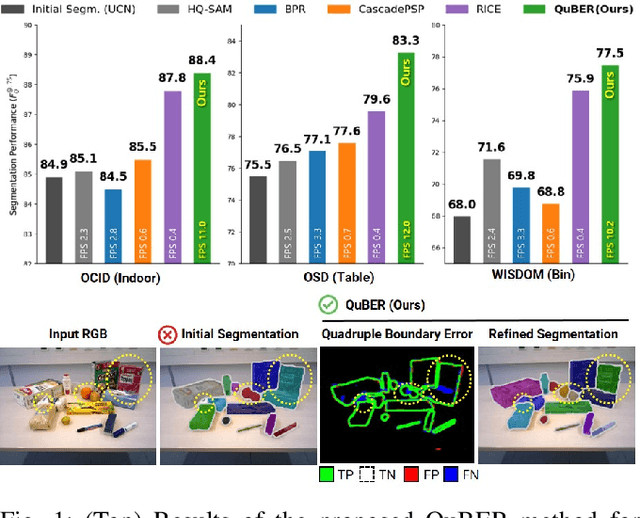
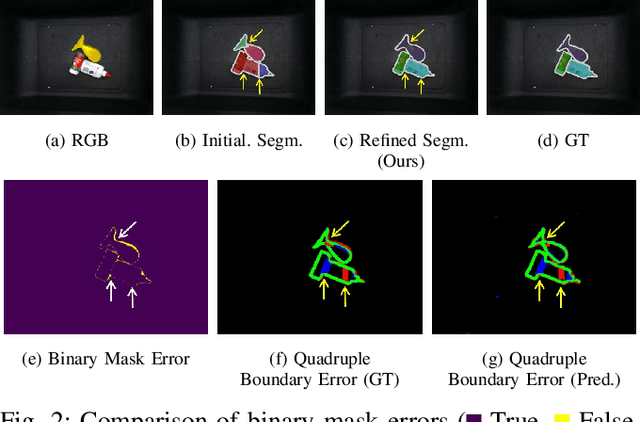
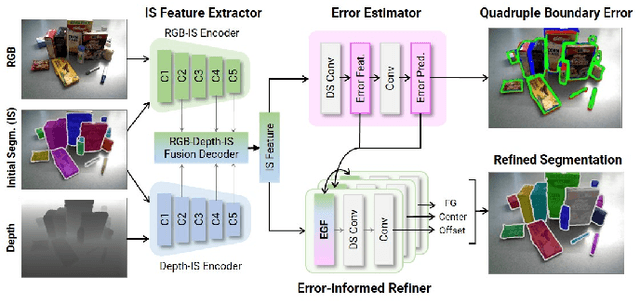
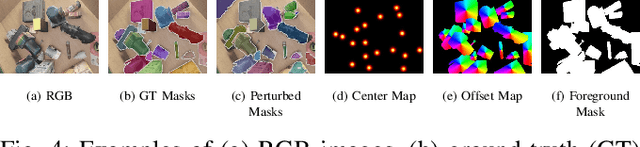
Efficient and accurate segmentation of unseen objects is crucial for robotic manipulation. However, it remains challenging due to over- or under-segmentation. Although existing refinement methods can enhance the segmentation quality, they fix only minor boundary errors or are not sufficiently fast. In this work, we propose INSTAnce Boundary Explicit Error Estimation and Refinement (INSTA-BEEER), a novel refinement model that allows for adding and deleting instances and sharpening boundaries. Leveraging an error-estimation-then-refinement scheme, the model first estimates the pixel-wise boundary explicit errors: true positive, true negative, false positive, and false negative pixels of the instance boundary in the initial segmentation. It then refines the initial segmentation using these error estimates as guidance. Experiments show that the proposed model significantly enhances segmentation, achieving state-of-the-art performance. Furthermore, with a fast runtime (less than 0.1 s), the model consistently improves performance across various initial segmentation methods, making it highly suitable for practical robotic applications.