 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeInfusing model predictive control into meta-reinforcement learning for mobile robots in dynamic environments
Paper and Code
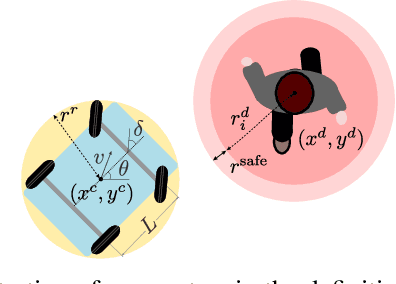
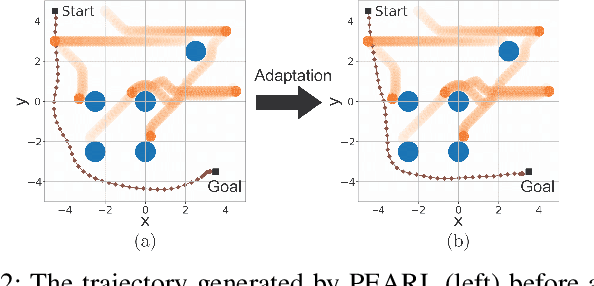
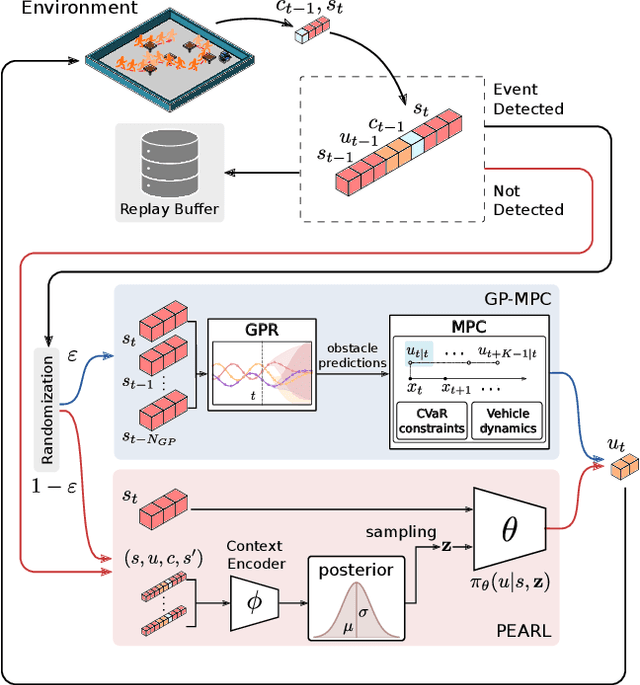
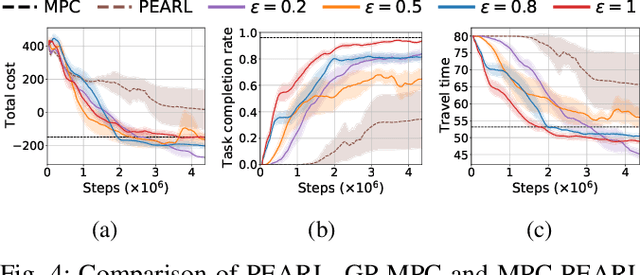
The successful operation of mobile robots requires them to rapidly adapt to environmental changes. Toward developing an adaptive decision-making tool for mobile robots, we propose combining meta-reinforcement learning (meta-RL) with model predictive control (MPC). The key idea of our method is to switch between a meta-learned policy and an MPC controller in an event-triggered fashion. Our method uses an off-policy meta-RL algorithm as a baseline to train a policy using transition samples generated by MPC. The MPC module of our algorithm is carefully designed to infer the movements of obstacles via Gaussian process regression (GPR) and to avoid collisions via conditional value-at-risk (CVaR) constraints. Due to its design, our method benefits from the two complementary tools. First, high-performance action samples generated by the MPC controller enhance the learning performance and stability of the meta-RL algorithm. Second, through the use of the meta-learned policy, the MPC controller is infrequently activated, thereby significantly reducing computation time. The results of our simulations on a restaurant service robot show that our algorithm outperforms both of the baseline methods.