Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeInferential Induction: Joint Bayesian Estimation of MDPs and Value Functions
Paper and Code
Feb 08, 2020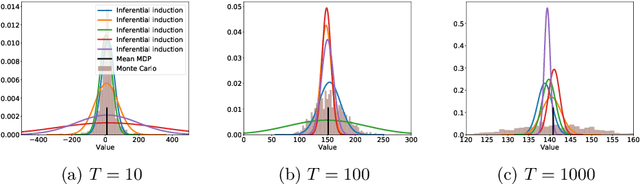
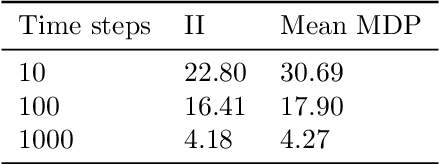
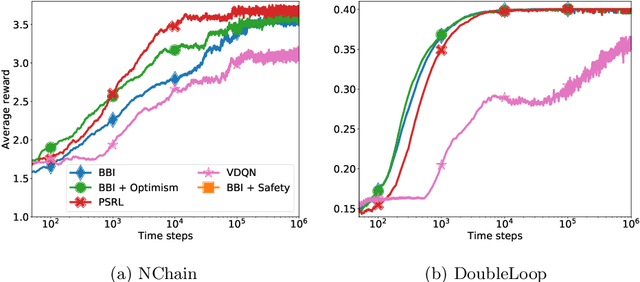
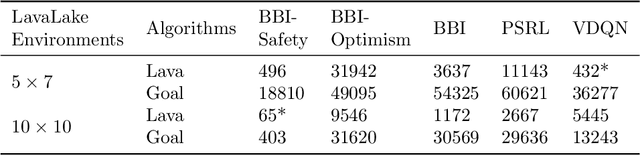
Bayesian reinforcement learning (BRL) offers a decision-theoretic solution to the problem of reinforcement learning. However, typical model-based BRL algorithms have focused either on ma intaining a posterior distribution on models or value functions and combining this with approx imate dynamic programming or tree search. This paper describes a novel backwards induction pri nciple for performing joint Bayesian estimation of models and value functions, from which many new BRL algorithms can be obtained. We demonstrate this idea with algorithms and experiments in discrete state spaces.
* 18 pages, 6 figures
View paper on