 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeInfer Human's Intentions Before Following Natural Language Instructions
Paper and Code
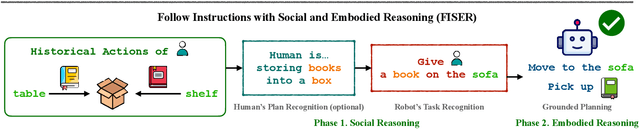

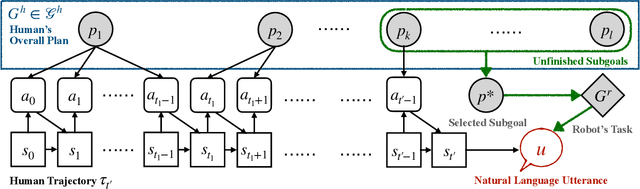

For AI agents to be helpful to humans, they should be able to follow natural language instructions to complete everyday cooperative tasks in human environments. However, real human instructions inherently possess ambiguity, because the human speakers assume sufficient prior knowledge about their hidden goals and intentions. Standard language grounding and planning methods fail to address such ambiguities because they do not model human internal goals as additional partially observable factors in the environment. We propose a new framework, Follow Instructions with Social and Embodied Reasoning (FISER), aiming for better natural language instruction following in collaborative embodied tasks. Our framework makes explicit inferences about human goals and intentions as intermediate reasoning steps. We implement a set of Transformer-based models and evaluate them over a challenging benchmark, HandMeThat. We empirically demonstrate that using social reasoning to explicitly infer human intentions before making action plans surpasses purely end-to-end approaches. We also compare our implementation with strong baselines, including Chain of Thought prompting on the largest available pre-trained language models, and find that FISER provides better performance on the embodied social reasoning tasks under investigation, reaching the state-of-the-art on HandMeThat.