Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeInertial-aided Motion Deblurring with Deep Networks
Paper and Code
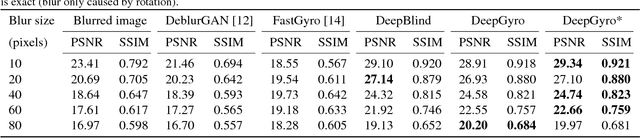


We propose an inertial-aided deblurring method that incorporates gyroscope measurements into a convolutional neural network (CNN). With the help of inertial measurements, it can handle extremely strong and spatially-variant motion blur. At the same time, the image data is used to overcome the limitations of gyro-based blur estimation. To train our network, we also introduce a novel way of generating realistic training data using the gyroscope. The evaluation shows a clear improvement in visual quality over the state-of-the-art while achieving real-time performance. Furthermore, the method is shown to improve the performance of existing feature detectors and descriptors against the motion blur.
View paper on