 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeIn-Simulation Testing of Deep Learning Vision Models in Autonomous Robotic Manipulators
Paper and Code
Oct 25, 2024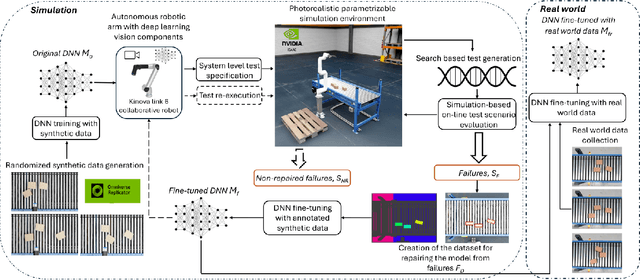

Testing autonomous robotic manipulators is challenging due to the complex software interactions between vision and control components. A crucial element of modern robotic manipulators is the deep learning based object detection model. The creation and assessment of this model requires real world data, which can be hard to label and collect, especially when the hardware setup is not available. The current techniques primarily focus on using synthetic data to train deep neural networks (DDNs) and identifying failures through offline or online simulation-based testing. However, the process of exploiting the identified failures to uncover design flaws early on, and leveraging the optimized DNN within the simulation to accelerate the engineering of the DNN for real-world tasks remains unclear. To address these challenges, we propose the MARTENS (Manipulator Robot Testing and Enhancement in Simulation) framework, which integrates a photorealistic NVIDIA Isaac Sim simulator with evolutionary search to identify critical scenarios aiming at improving the deep learning vision model and uncovering system design flaws. Evaluation of two industrial case studies demonstrated that MARTENS effectively reveals robotic manipulator system failures, detecting 25 % to 50 % more failures with greater diversity compared to random test generation. The model trained and repaired using the MARTENS approach achieved mean average precision (mAP) scores of 0.91 and 0.82 on real-world images with no prior retraining. Further fine-tuning on real-world images for a few epochs (less than 10) increased the mAP to 0.95 and 0.89 for the first and second use cases, respectively. In contrast, a model trained solely on real-world data achieved mAPs of 0.8 and 0.75 for use case 1 and use case 2 after more than 25 epochs.