 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeImproving Video Instance Segmentation by Light-weight Temporal Uncertainty Estimates
Paper and Code


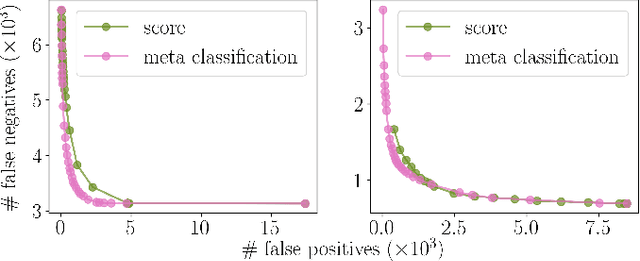

Instance segmentation with neural networks is an essential task in environment perception. However, the networks can predict false positive instances with high confidence values and true positives with low ones. Hence, it is important to accurately model the uncertainties of neural networks to prevent safety issues and foster interpretability. In applications such as automated driving the detection of road users like vehicles and pedestrians is of highest interest. We present a temporal approach to detect false positives and investigate uncertainties of instance segmentation networks. Since image sequences are available for online applications, we track instances over multiple frames and create temporal instance-wise aggregated metrics of uncertainty. The prediction quality is estimated by predicting the intersection over union as performance measure. Furthermore, we show how to use uncertainty information to replace the traditional score value from object detection and improve the overall performance of instance segmentation networks.