 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeImproving Human Decision-Making by Discovering Efficient Strategies for Hierarchical Planning
Paper and Code
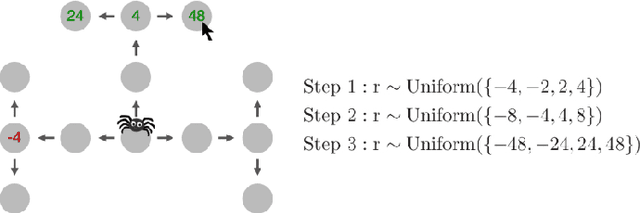
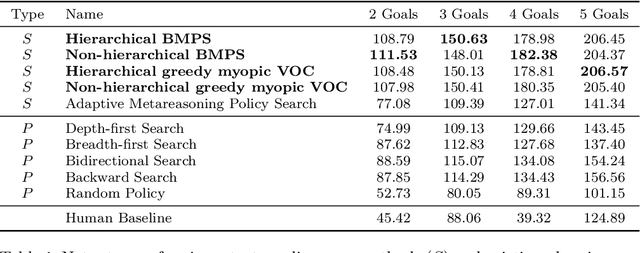
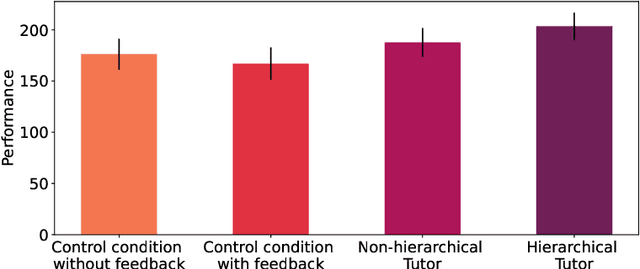
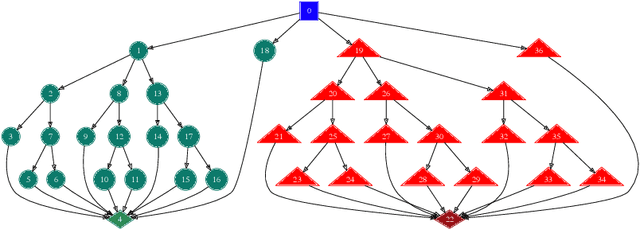
To make good decisions in the real world people need efficient planning strategies because their computational resources are limited. Knowing which planning strategies would work best for people in different situations would be very useful for understanding and improving human decision-making. But our ability to compute those strategies used to be limited to very small and very simple planning tasks. To overcome this computational bottleneck, we introduce a cognitively-inspired reinforcement learning method that can overcome this limitation by exploiting the hierarchical structure of human behavior. The basic idea is to decompose sequential decision problems into two sub-problems: setting a goal and planning how to achieve it. This hierarchical decomposition enables us to discover optimal strategies for human planning in larger and more complex tasks than was previously possible. The discovered strategies outperform existing planning algorithms and achieve a super-human level of computational efficiency. We demonstrate that teaching people to use those strategies significantly improves their performance in sequential decision-making tasks that require planning up to eight steps ahead. By contrast, none of the previous approaches was able to improve human performance on these problems. These findings suggest that our cognitively-informed approach makes it possible to leverage reinforcement learning to improve human decision-making in complex sequential decision-problems. Future work can leverage our method to develop decision support systems that improve human decision making in the real world.