 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeImproving Few-Shot Inductive Learning on Temporal Knowledge Graphs using Confidence-Augmented Reinforcement Learning
Paper and Code
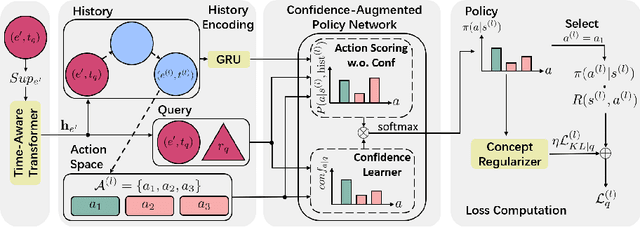

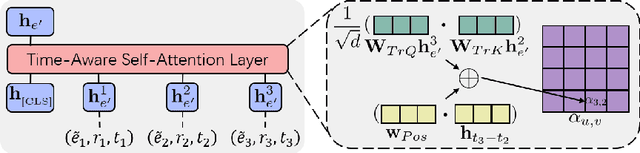
Temporal knowledge graph completion (TKGC) aims to predict the missing links among the entities in a temporal knwoledge graph (TKG). Most previous TKGC methods only consider predicting the missing links among the entities seen in the training set, while they are unable to achieve great performance in link prediction concerning newly-emerged unseen entities. Recently, a new task, i.e., TKG few-shot out-of-graph (OOG) link prediction, is proposed, where TKGC models are required to achieve great link prediction performance concerning newly-emerged entities that only have few-shot observed examples. In this work, we propose a TKGC method FITCARL that combines few-shot learning with reinforcement learning to solve this task. In FITCARL, an agent traverses through the whole TKG to search for the prediction answer. A policy network is designed to guide the search process based on the traversed path. To better address the data scarcity problem in the few-shot setting, we introduce a module that computes the confidence of each candidate action and integrate it into the policy for action selection. We also exploit the entity concept information with a novel concept regularizer to boost model performance. Experimental results show that FITCARL achieves stat-of-the-art performance on TKG few-shot OOG link prediction.