 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeImplicit Generative Modeling for Efficient Exploration
Paper and Code
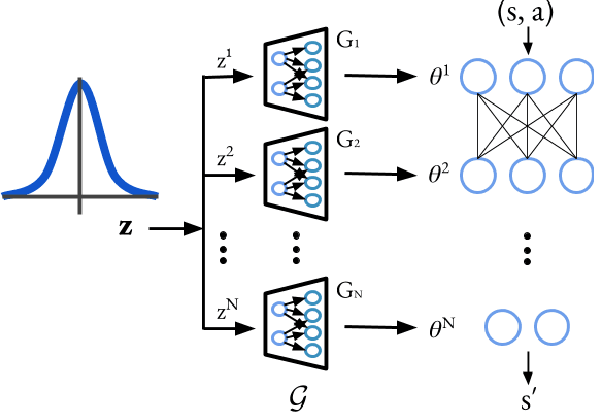

Efficient exploration remains a challenging problem in reinforcement learning, especially for those tasks where rewards from environments are sparse. A commonly used approach for exploring such environments is to introduce some "intrinsic" reward. In this work, we focus on model uncertainty estimation as an intrinsic reward for efficient exploration. In particular, we introduce an implicit generative modeling approach to estimate a Bayesian uncertainty of the agent's belief of the environment dynamics. Each random draw from our generative model is a neural network that instantiates the dynamic function, hence multiple draws would approximate the posterior, and the variance in the future prediction based on this posterior is used as an intrinsic reward for exploration. We design a training algorithm for our generative model based on the amortized Stein Variational Gradient Descent. In experiments, we compare our implementation with state-of-the-art intrinsic reward-based exploration approaches, including two recent approaches based on an ensemble of dynamic models. In challenging exploration tasks, our implicit generative model consistently outperforms competing approaches regarding data efficiency in exploration.