 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeImmortal Tracker: Tracklet Never Dies
Paper and Code
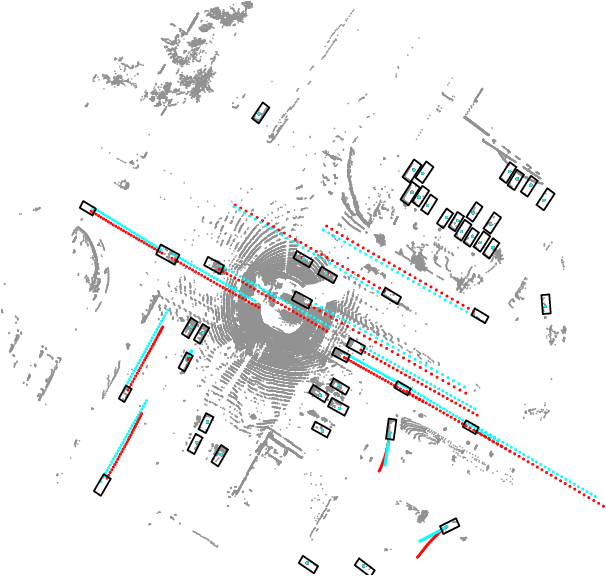
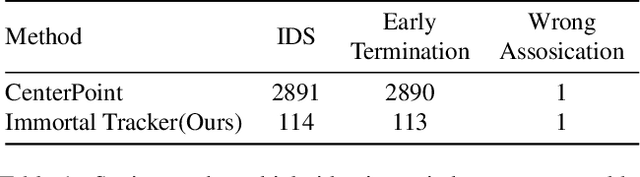
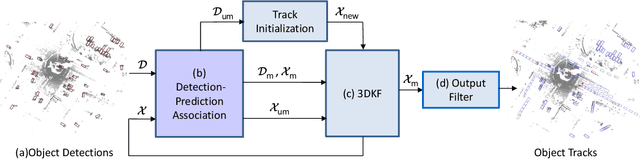
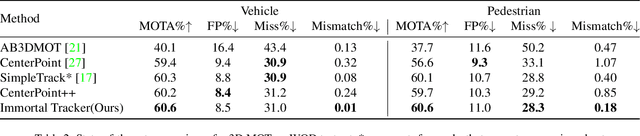
Previous online 3D Multi-Object Tracking(3DMOT) methods terminate a tracklet when it is not associated with new detections for a few frames. But if an object just goes dark, like being temporarily occluded by other objects or simply getting out of FOV, terminating a tracklet prematurely will result in an identity switch. We reveal that premature tracklet termination is the main cause of identity switches in modern 3DMOT systems. To address this, we propose Immortal Tracker, a simple tracking system that utilizes trajectory prediction to maintain tracklets for objects gone dark. We employ a simple Kalman filter for trajectory prediction and preserve the tracklet by prediction when the target is not visible. With this method, we can avoid 96% vehicle identity switches resulting from premature tracklet termination. Without any learned parameters, our method achieves a mismatch ratio at the 0.0001 level and competitive MOTA for the vehicle class on the Waymo Open Dataset test set. Our mismatch ratio is tens of times lower than any previously published method. Similar results are reported on nuScenes. We believe the proposed Immortal Tracker can offer a simple yet powerful solution for pushing the limit of 3DMOT. Our code is available at https://github.com/ImmortalTracker/ImmortalTracker.