 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeImLoveNet: Misaligned Image-supported Registration Network for Low-overlap Point Cloud Pairs
Paper and Code
Jul 02, 2022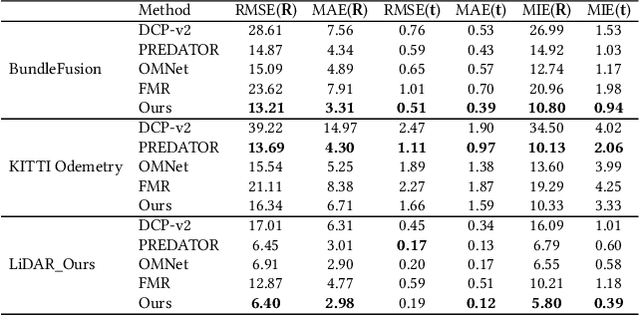
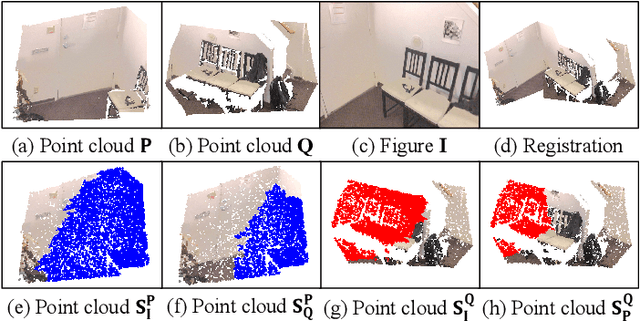
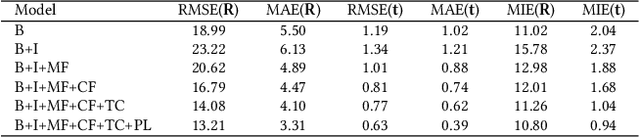
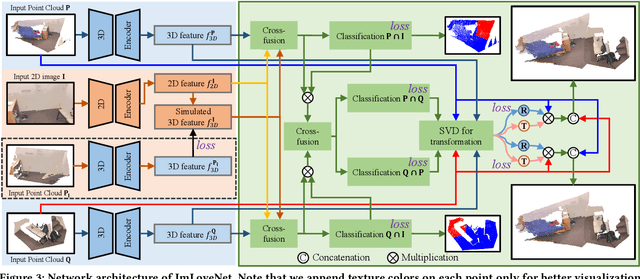
Low-overlap regions between paired point clouds make the captured features very low-confidence, leading cutting edge models to point cloud registration with poor quality. Beyond the traditional wisdom, we raise an intriguing question: Is it possible to exploit an intermediate yet misaligned image between two low-overlap point clouds to enhance the performance of cutting-edge registration models? To answer it, we propose a misaligned image supported registration network for low-overlap point cloud pairs, dubbed ImLoveNet. ImLoveNet first learns triple deep features across different modalities and then exports these features to a two-stage classifier, for progressively obtaining the high-confidence overlap region between the two point clouds. Therefore, soft correspondences are well established on the predicted overlap region, resulting in accurate rigid transformations for registration. ImLoveNet is simple to implement yet effective, since 1) the misaligned image provides clearer overlap information for the two low-overlap point clouds to better locate overlap parts; 2) it contains certain geometry knowledge to extract better deep features; and 3) it does not require the extrinsic parameters of the imaging device with respect to the reference frame of the 3D point cloud. Extensive qualitative and quantitative evaluations on different kinds of benchmarks demonstrate the effectiveness and superiority of our ImLoveNet over state-of-the-art approaches.