 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeImitation Learning for Human Pose Prediction
Paper and Code
Sep 08, 2019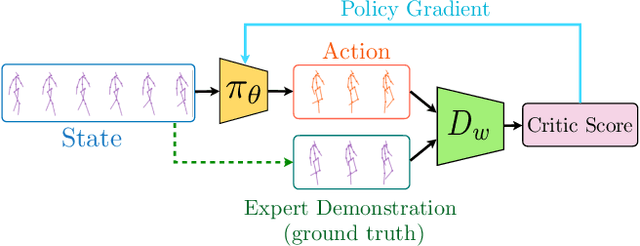
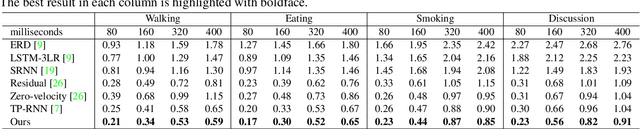
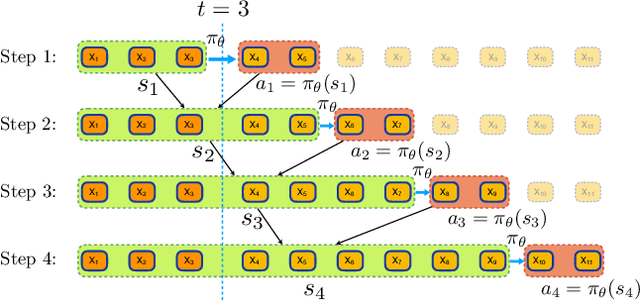
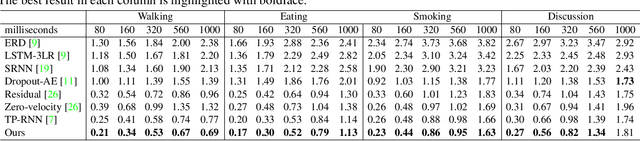
Modeling and prediction of human motion dynamics has long been a challenging problem in computer vision, and most existing methods rely on the end-to-end supervised training of various architectures of recurrent neural networks. Inspired by the recent success of deep reinforcement learning methods, in this paper we propose a new reinforcement learning formulation for the problem of human pose prediction, and develop an imitation learning algorithm for predicting future poses under this formulation through a combination of behavioral cloning and generative adversarial imitation learning. Our experiments show that our proposed method outperforms all existing state-of-the-art baseline models by large margins on the task of human pose prediction in both short-term predictions and long-term predictions, while also enjoying huge advantage in training speed.