 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeImage-Based Conditioning for Action Policy Smoothness in Autonomous Miniature Car Racing with Reinforcement Learning
Paper and Code
May 19, 2022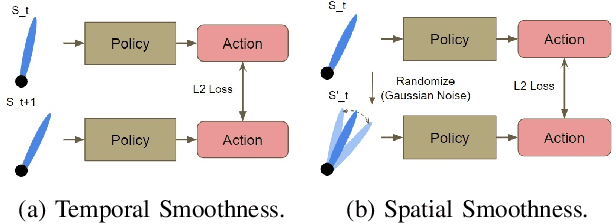

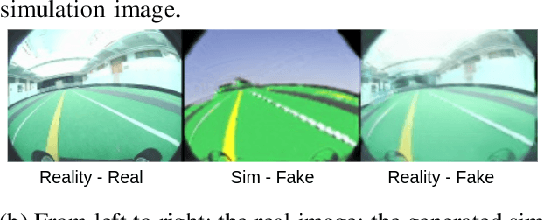
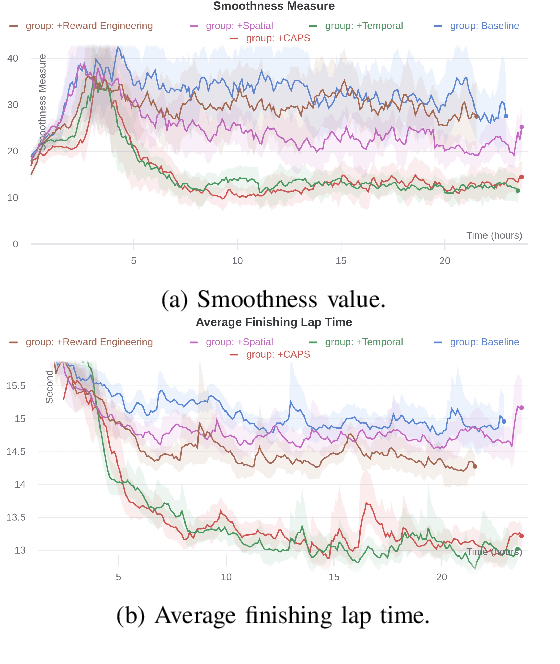
In recent years, deep reinforcement learning has achieved significant results in low-level controlling tasks. However, the problem of control smoothness has less attention. In autonomous driving, unstable control is inevitable since the vehicle might suddenly change its actions. This problem will lower the controlling system's efficiency, induces excessive mechanical wear, and causes uncontrollable, dangerous behavior to the vehicle. In this paper, we apply the Conditioning for Action Policy Smoothness (CAPS) with image-based input to smooth the control of an autonomous miniature car racing. Applying CAPS and sim-to-real transfer methods helps to stabilize the control at a higher speed. Especially, the agent with CAPS and CycleGAN reduces 21.80% of the average finishing lap time. Moreover, we also conduct extensive experiments to analyze the impact of CAPS components.