 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeILoSA: Interactive Learning of Stiffness and Attractors
Paper and Code
Mar 04, 2021

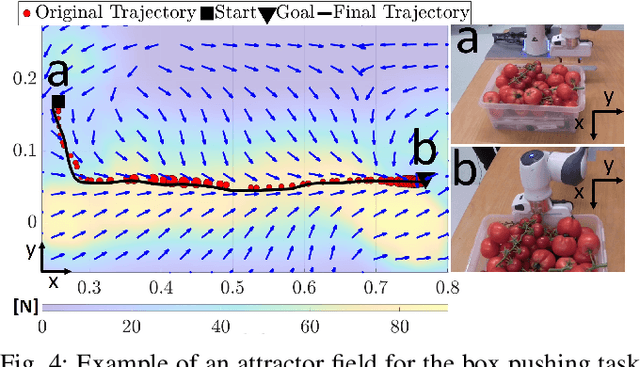

Teaching robots how to apply forces according to our preferences is still an open challenge that has to be tackled from multiple engineering perspectives. This paper studies how to learn variable impedance policies where both the Cartesian stiffness and the attractor can be learned from human demonstrations and corrections with a user-friendly interface. The presented framework, named ILoSA, uses Gaussian Processes for policy learning, identifying regions of uncertainty and allowing interactive corrections, stiffness modulation and active disturbance rejection. The experimental evaluation of the framework is carried out on a Franka-Emika Panda in three separate cases with unique force interaction properties: 1) pulling a plug wherein a sudden force discontinuity occurs upon successful removal of the plug, 2) pushing a box where a sustained force is required to keep the robot in motion, and 3) wiping a whiteboard in which the force is applied perpendicular to the direction of movement.