Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeiCub: Learning Emotion Expressions using Human Reward
Paper and Code
Mar 30, 2020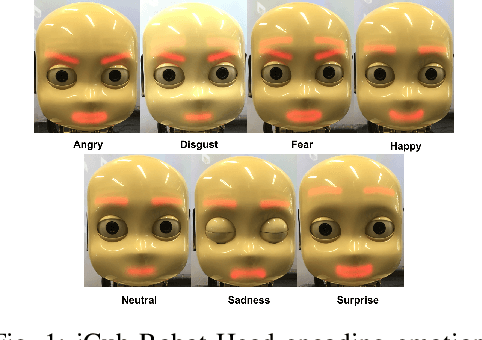

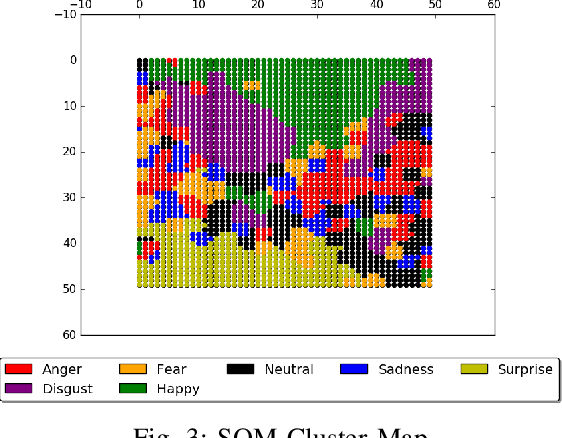

The purpose of the present study is to learn emotion expression representations for artificial agents using reward shaping mechanisms. The approach takes inspiration from the TAMER framework for training a Multilayer Perceptron (MLP) to learn to express different emotions on the iCub robot in a human-robot interaction scenario. The robot uses a combination of a Convolutional Neural Network (CNN) and a Self-Organising Map (SOM) to recognise an emotion and then learns to express the same using the MLP. The objective is to teach a robot to respond adequately to the user's perception of emotions and learn how to express different emotions.
* Published in the Workshop on Bio-inspired Social Robot Learning in
Home Scenarios, IEEE/RSJ International Conference on Intelligent Robots and
Systems (IROS), Daejeon, Korea (2016)
View paper on