 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHyper-STTN: Social Group-aware Spatial-Temporal Transformer Network for Human Trajectory Prediction with Hypergraph Reasoning
Paper and Code
Jan 12, 2024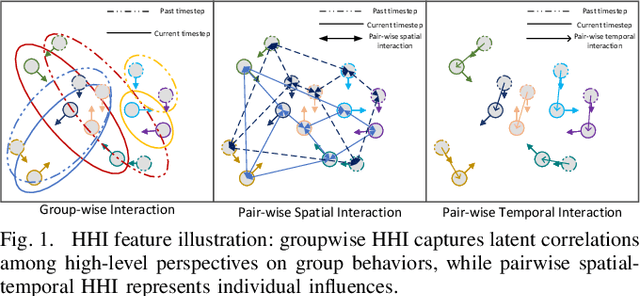
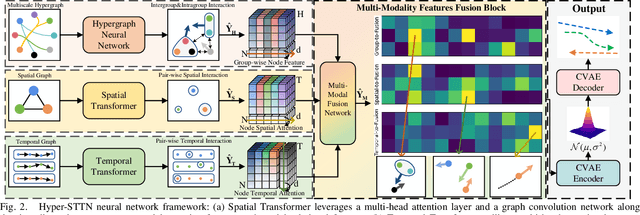
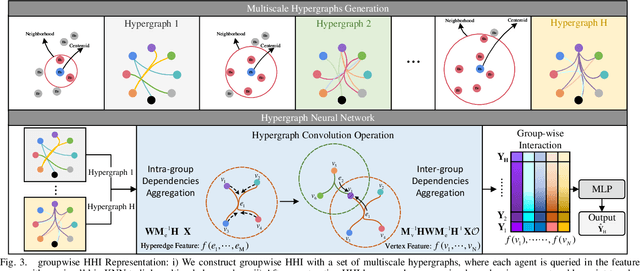
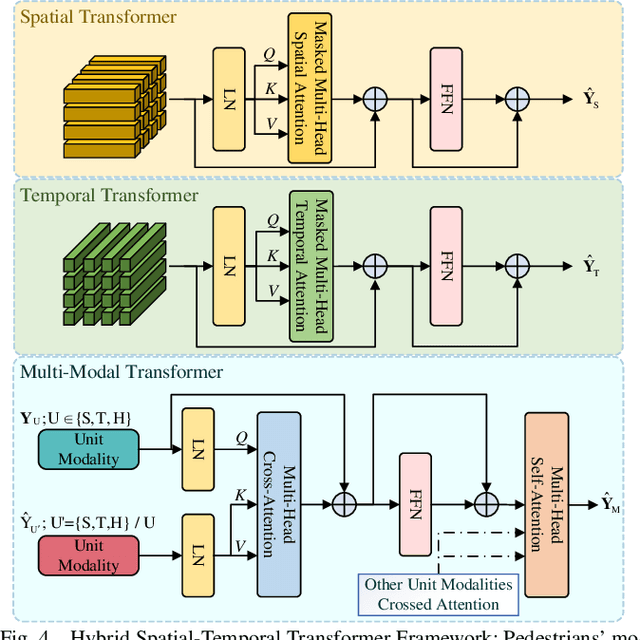
Predicting crowded intents and trajectories is crucial in varouls real-world applications, including service robots and autonomous vehicles. Understanding environmental dynamics is challenging, not only due to the complexities of modeling pair-wise spatial and temporal interactions but also the diverse influence of group-wise interactions. To decode the comprehensive pair-wise and group-wise interactions in crowded scenarios, we introduce Hyper-STTN, a Hypergraph-based Spatial-Temporal Transformer Network for crowd trajectory prediction. In Hyper-STTN, crowded group-wise correlations are constructed using a set of multi-scale hypergraphs with varying group sizes, captured through random-walk robability-based hypergraph spectral convolution. Additionally, a spatial-temporal transformer is adapted to capture pedestrians' pair-wise latent interactions in spatial-temporal dimensions. These heterogeneous group-wise and pair-wise are then fused and aligned though a multimodal transformer network. Hyper-STTN outperformes other state-of-the-art baselines and ablation models on 5 real-world pedestrian motion datasets.