 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHuman-Vehicle Cooperative Visual Perception for Shared Autonomous Driving
Paper and Code
Dec 17, 2021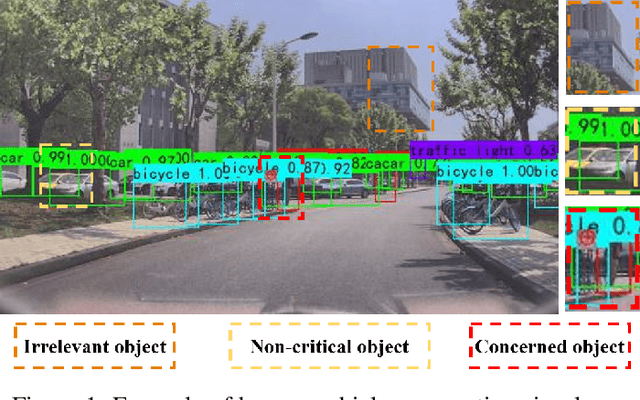
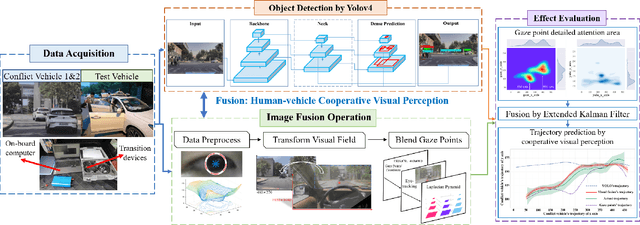
With the development of key technologies like environment perception, the automation level of autonomous vehicles has been increasing. However, before reaching highly autonomous driving, manual driving still needs to participate in the driving process to ensure the safety of human-vehicle shared driving. The existing human-vehicle cooperative driving focuses on auto engineering and drivers' behaviors, with few research studies in the field of visual perception. Due to the bad performance in the complex road traffic conflict scenarios, cooperative visual perception needs to be studied further. In addition, the autonomous driving perception system cannot correctly understand the characteristics of manual driving. Based on the background above, this paper directly proposes a human-vehicle cooperative visual perception method to enhance the visual perception ability of shared autonomous driving based on the transfer learning method and the image fusion algorithm for the complex road traffic scenarios. Based on transfer learning, the mAP of object detection reaches 75.52% and lays a solid foundation for visual fusion. And the fusion experiment further reveals that human-vehicle cooperative visual perception reflects the riskiest zone and predicts the conflict object's trajectory more precisely. This study pioneers a cooperative visual perception solution for shared autonomous driving and experiments in real-world complex traffic conflict scenarios, which can better support the following planning and controlling and improve the safety of autonomous vehicles.