 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHRDFuse: Monocular 360°Depth Estimation by Collaboratively Learning Holistic-with-Regional Depth Distributions
Paper and Code
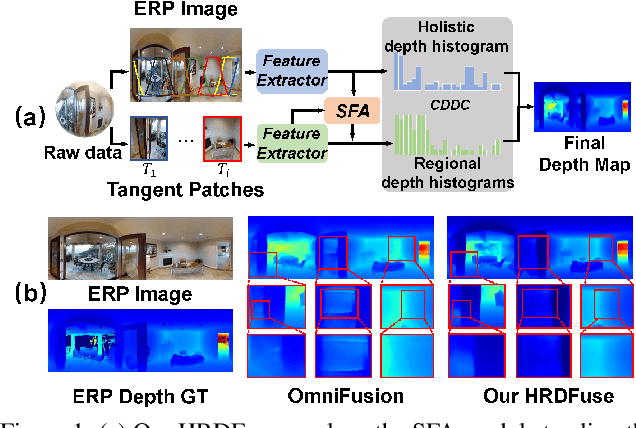
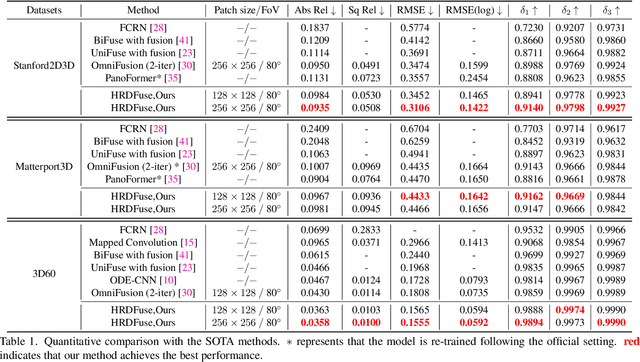
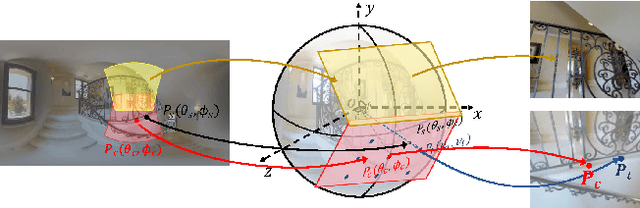
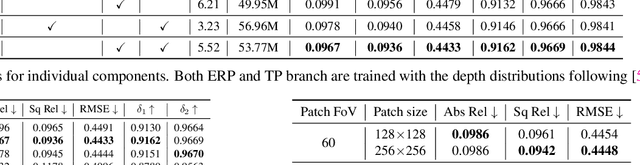
Depth estimation from a monocular 360{\deg} image is a burgeoning problem owing to its holistic sensing of a scene. Recently, some methods, \eg, OmniFusion, have applied the tangent projection (TP) to represent a 360{\deg}image and predicted depth values via patch-wise regressions, which are merged to get a depth map with equirectangular projection (ERP) format. However, these methods suffer from 1) non-trivial process of merging plenty of patches; 2) capturing less holistic-with-regional contextual information by directly regressing the depth value of each pixel. In this paper, we propose a novel framework, \textbf{HRDFuse}, that subtly combines the potential of convolutional neural networks (CNNs) and transformers by collaboratively learning the \textit{holistic} contextual information from the ERP and the \textit{regional} structural information from the TP. Firstly, we propose a spatial feature alignment (\textbf{SFA}) module that learns feature similarities between the TP and ERP to aggregate the TP features into a complete ERP feature map in a pixel-wise manner. Secondly, we propose a collaborative depth distribution classification (\textbf{CDDC}) module that learns the \textbf{holistic-with-regional} histograms capturing the ERP and TP depth distributions. As such, the final depth values can be predicted as a linear combination of histogram bin centers. Lastly, we adaptively combine the depth predictions from ERP and TP to obtain the final depth map. Extensive experiments show that our method predicts\textbf{ more smooth and accurate depth} results while achieving \textbf{favorably better} results than the SOTA methods.