 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHighly-Efficient Binary Neural Networks for Visual Place Recognition
Paper and Code
Feb 24, 2022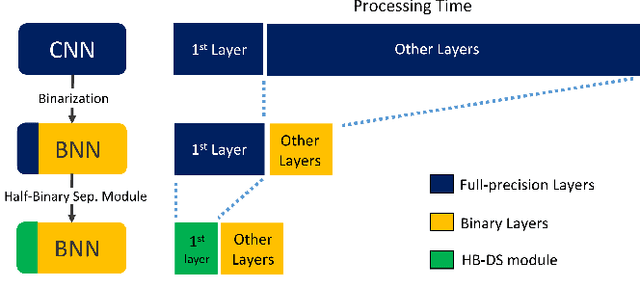
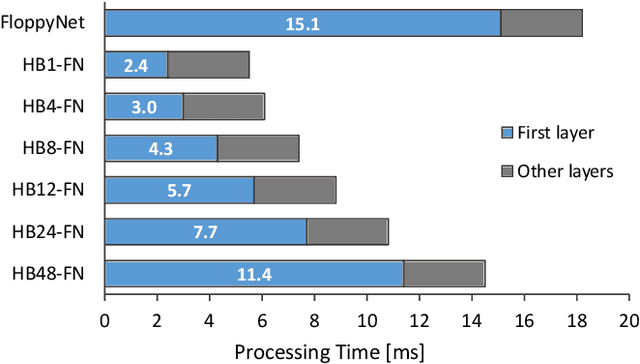

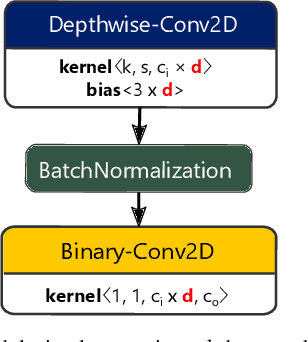
VPR is a fundamental task for autonomous navigation as it enables a robot to localize itself in the workspace when a known location is detected. Although accuracy is an essential requirement for a VPR technique, computational and energy efficiency are not less important for real-world applications. CNN-based techniques archive state-of-the-art VPR performance but are computationally intensive and energy demanding. Binary neural networks (BNN) have been recently proposed to address VPR efficiently. Although a typical BNN is an order of magnitude more efficient than a CNN, its processing time and energy usage can be further improved. In a typical BNN, the first convolution is not completely binarized for the sake of accuracy. Consequently, the first layer is the slowest network stage, requiring a large share of the entire computational effort. This paper presents a class of BNNs for VPR that combines depthwise separable factorization and binarization to replace the first convolutional layer to improve computational and energy efficiency. Our best model achieves state-of-the-art VPR performance while spending considerably less time and energy to process an image than a BNN using a non-binary convolution as a first stage.