 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHierMUD: Hierarchical Multi-task Unsupervised Domain Adaptation between Bridges for Drive-by Damage Diagnosis
Paper and Code
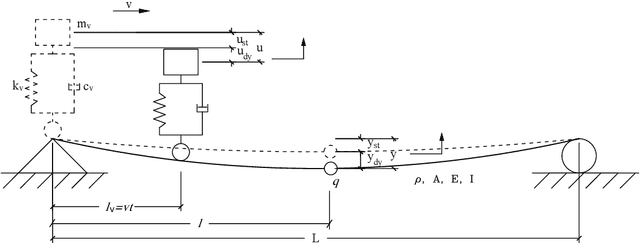
Monitoring bridge health using vibrations of drive-by vehicles has various benefits, such as no need for directly installing and maintaining sensors on the bridge. However, many of the existing drive-by monitoring approaches are based on supervised learning models that require labeled data from every bridge of interest, which is expensive and time-consuming, if not impossible, to obtain. To this end, we introduce a new framework that transfers the model learned from one bridge to diagnose damage in another bridge without any labels from the target bridge. Our framework trains a hierarchical neural network model in an adversarial way to extract task-shared and task-specific features that are informative to multiple diagnostic tasks and invariant across multiple bridges. We evaluate our framework on experimental data collected from 2 bridges and 3 vehicles. We achieve accuracies of 95% for damage detection, 93% for localization, and up to 72% for quantification, which are ~2 times improvements from baseline methods.