 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHierarchy of GANs for learning embodied self-awareness model
Paper and Code
Jun 08, 2018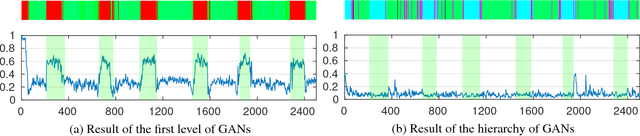
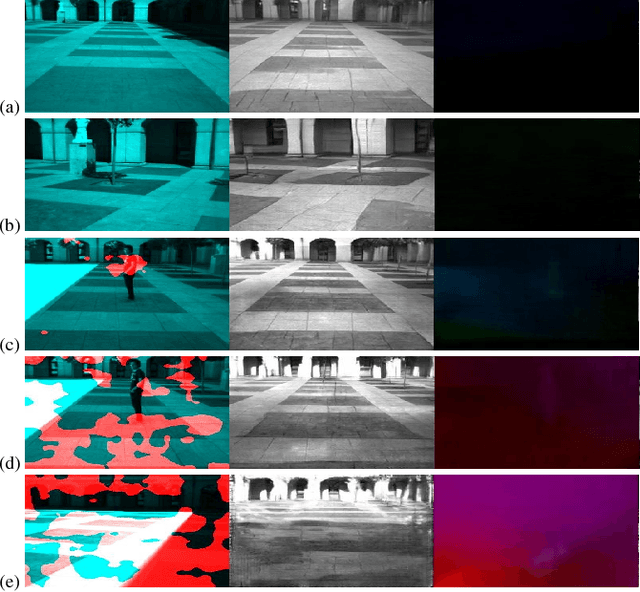

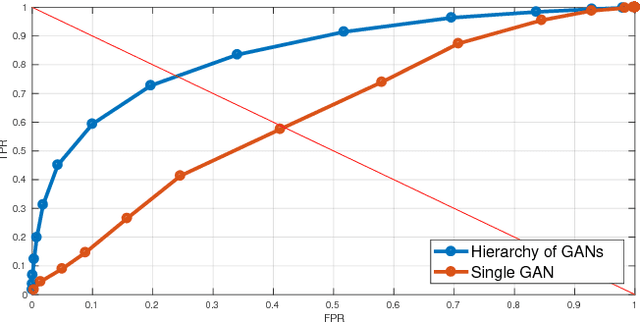
In recent years several architectures have been proposed to learn embodied agents complex self-awareness models. In this paper, dynamic incremental self-awareness (SA) models are proposed that allow experiences done by an agent to be modeled in a hierarchical fashion, starting from more simple situations to more structured ones. Each situation is learned from subsets of private agent perception data as a model capable to predict normal behaviors and detect abnormalities. Hierarchical SA models have been already proposed using low dimensional sensorial inputs. In this work, a hierarchical model is introduced by means of a cross-modal Generative Adversarial Networks (GANs) processing high dimensional visual data. Different levels of the GANs are detected in a self-supervised manner using GANs discriminators decision boundaries. Real experiments on semi-autonomous ground vehicles are presented.