 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHDRFusion: HDR SLAM using a low-cost auto-exposure RGB-D sensor
Paper and Code
Apr 04, 2016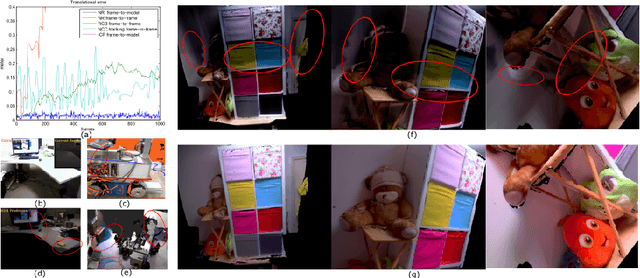
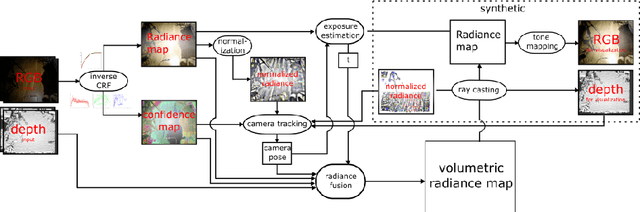

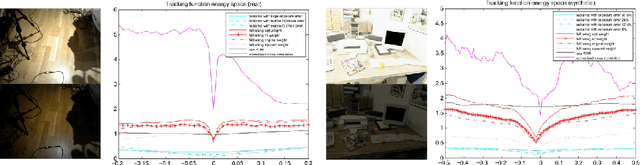
We describe a new method for comparing frame appearance in a frame-to-model 3-D mapping and tracking system using an low dynamic range (LDR) RGB-D camera which is robust to brightness changes caused by auto exposure. It is based on a normalised radiance measure which is invariant to exposure changes and not only robustifies the tracking under changing lighting conditions, but also enables the following exposure compensation perform accurately to allow online building of high dynamic range (HDR) maps. The latter facilitates the frame-to-model tracking to minimise drift as well as better capturing light variation within the scene. Results from experiments with synthetic and real data demonstrate that the method provides both improved tracking and maps with far greater dynamic range of luminosity.