 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHarnessing Heterogeneity: Learning from Decomposed Feedback in Bayesian Modeling
Paper and Code
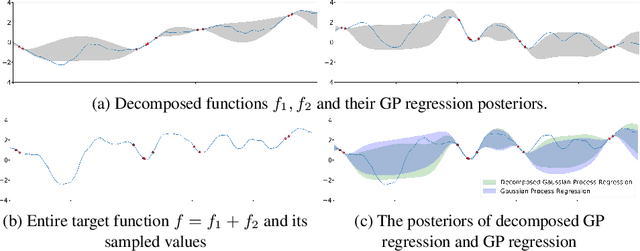

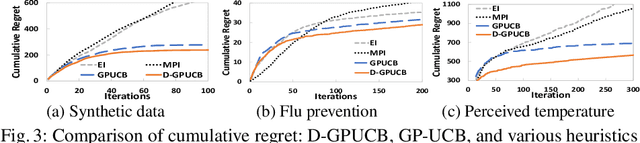
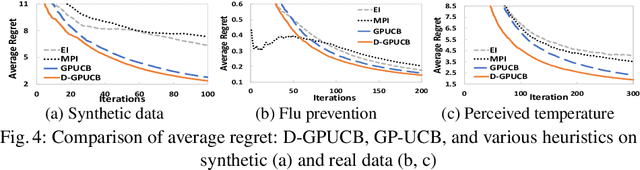
There is significant interest in learning and optimizing a complex system composed of multiple sub-components, where these components may be agents or autonomous sensors. Among the rich literature on this topic, agent-based and domain-specific simulations can capture complex dynamics and subgroup interaction, but optimizing over such simulations can be computationally and algorithmically challenging. Bayesian approaches, such as Gaussian processes (GPs), can be used to learn a computationally tractable approximation to the underlying dynamics but typically neglect the detailed information about subgroups in the complicated system. We attempt to find the best of both worlds by proposing the idea of decomposed feedback, which captures group-based heterogeneity and dynamics. We introduce a novel decomposed GP regression to incorporate the subgroup decomposed feedback. Our modified regression has provably lower variance -- and thus a more accurate posterior -- compared to previous approaches; it also allows us to introduce a decomposed GP-UCB optimization algorithm that leverages subgroup feedback. The Bayesian nature of our method makes the optimization algorithm trackable with a theoretical guarantee on convergence and no-regret property. To demonstrate the wide applicability of this work, we execute our algorithm on two disparate social problems: infectious disease control in a heterogeneous population and allocation of distributed weather sensors. Experimental results show that our new method provides significant improvement compared to the state-of-the-art.