 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGrasping with Chopsticks: Combating Covariate Shift in Model-free Imitation Learning for Fine Manipulation
Paper and Code
Nov 13, 2020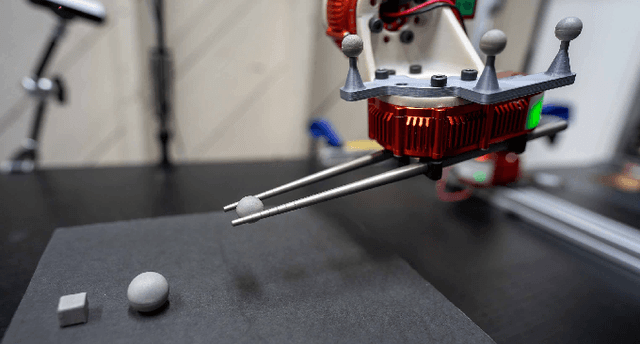


Billions of people use chopsticks, a simple yet versatile tool, for fine manipulation of everyday objects. The small, curved, and slippery tips of chopsticks pose a challenge for picking up small objects, making them a suitably complex test case. This paper leverages human demonstrations to develop an autonomous chopsticks-equipped robotic manipulator. Due to the lack of accurate models for fine manipulation, we explore model-free imitation learning, which traditionally suffers from the covariate shift phenomenon that causes poor generalization. We propose two approaches to reduce covariate shift, neither of which requires access to an interactive expert or a model, unlike previous approaches. First, we alleviate single-step prediction errors by applying an invariant operator to increase the data support at critical steps for grasping. Second, we generate synthetic corrective labels by adding bounded noise and combining parametric and non-parametric methods to prevent error accumulation. We demonstrate our methods on a real chopstick-equipped robot that we built, and observe the agent's success rate increase from 37.3% to 80%, which is comparable to the human expert performance of 82.6%.