 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGPT-Fabric: Folding and Smoothing Fabric by Leveraging Pre-Trained Foundation Models
Paper and Code
Jun 14, 2024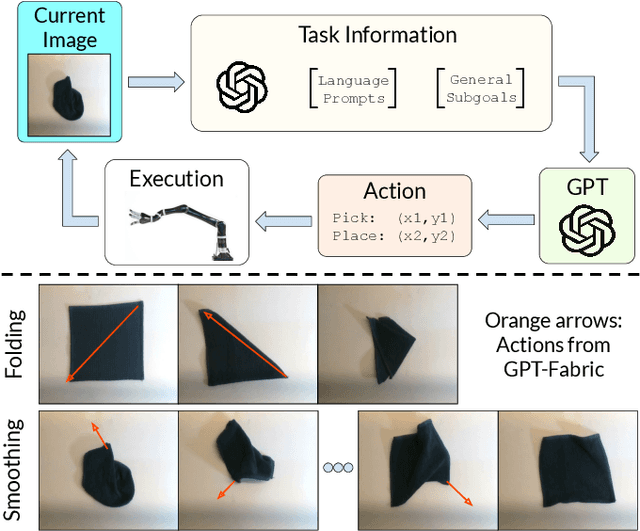
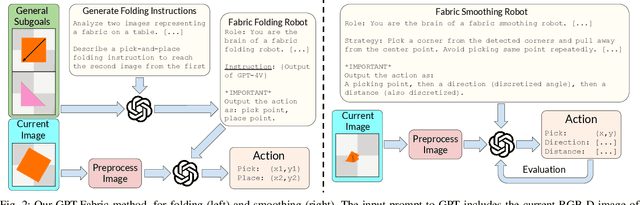
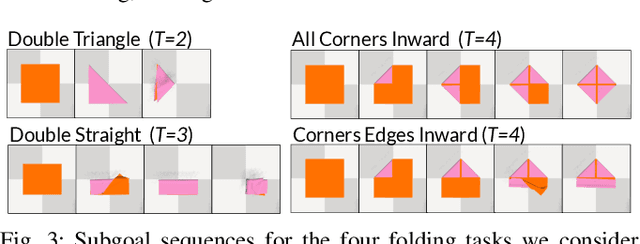
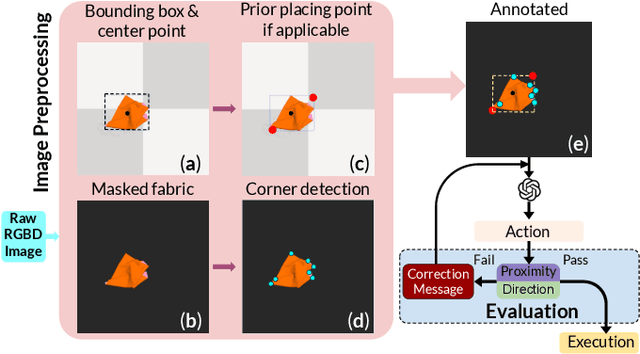
Fabric manipulation has applications in folding blankets, handling patient clothing, and protecting items with covers. It is challenging for robots to perform fabric manipulation since fabrics have infinite-dimensional configuration spaces, complex dynamics, and may be in folded or crumpled configurations with severe self-occlusions. Prior work on robotic fabric manipulation relies either on heavily engineered setups or learning-based approaches that create and train on robot-fabric interaction data. In this paper, we propose GPT-Fabric for the canonical tasks of fabric folding and smoothing, where GPT directly outputs an action informing a robot where to grasp and pull a fabric. We perform extensive experiments in simulation to test GPT-Fabric against prior state of the art methods for folding and smoothing. We obtain comparable or better performance to most methods even without explicitly training on a fabric-specific dataset (i.e., zero-shot manipulation). Furthermore, we apply GPT-Fabric in physical experiments over 12 folding and 10 smoothing rollouts. Our results suggest that GPT-Fabric is a promising approach for high-precision fabric manipulation tasks.