 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGLC-SLAM: Gaussian Splatting SLAM with Efficient Loop Closure
Paper and Code
Sep 17, 2024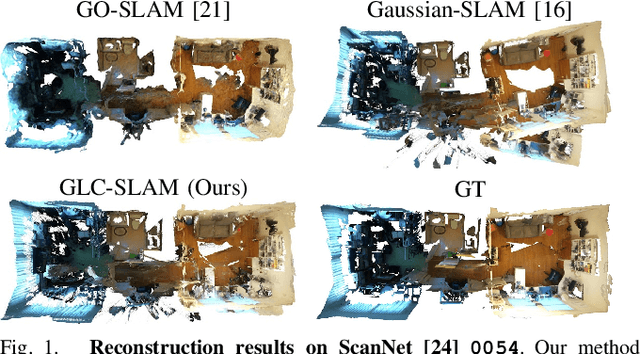
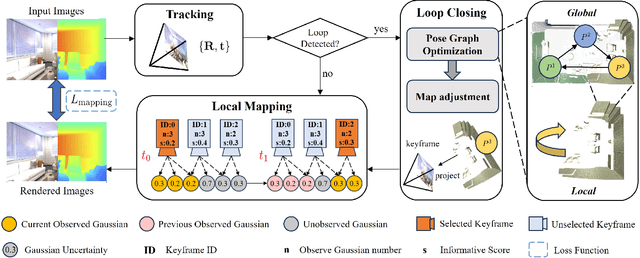
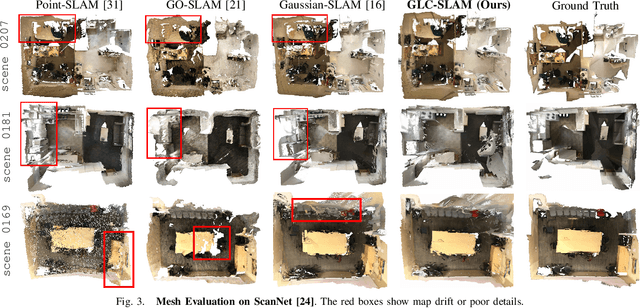
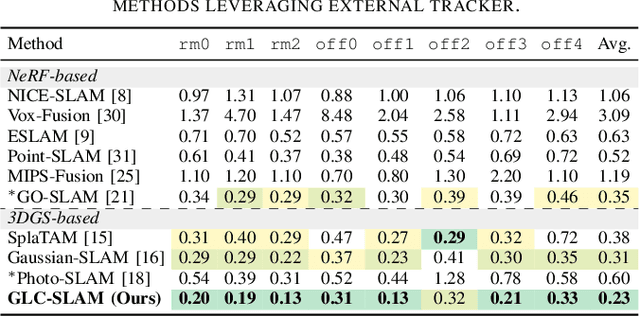
3D Gaussian Splatting (3DGS) has gained significant attention for its application in dense Simultaneous Localization and Mapping (SLAM), enabling real-time rendering and high-fidelity mapping. However, existing 3DGS-based SLAM methods often suffer from accumulated tracking errors and map drift, particularly in large-scale environments. To address these issues, we introduce GLC-SLAM, a Gaussian Splatting SLAM system that integrates global optimization of camera poses and scene models. Our approach employs frame-to-model tracking and triggers hierarchical loop closure using a global-to-local strategy to minimize drift accumulation. By dividing the scene into 3D Gaussian submaps, we facilitate efficient map updates following loop corrections in large scenes. Additionally, our uncertainty-minimized keyframe selection strategy prioritizes keyframes observing more valuable 3D Gaussians to enhance submap optimization. Experimental results on various datasets demonstrate that GLC-SLAM achieves superior or competitive tracking and mapping performance compared to state-of-the-art dense RGB-D SLAM systems.