 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGIDP: Learning a Good Initialization and Inducing Descriptor Post-enhancing for Large-scale Place Recognition
Paper and Code
Sep 23, 2022
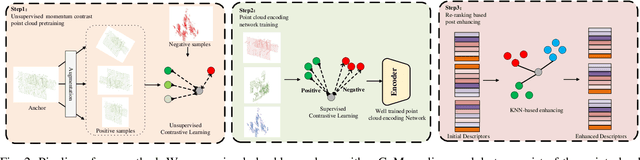


Large-scale place recognition is a fundamental but challenging task, which plays an increasingly important role in autonomous driving and robotics. Existing methods have achieved acceptable good performance, however, most of them are concentrating on designing elaborate global descriptor learning network structures. The importance of feature generalization and descriptor post-enhancing has long been neglected. In this work, we propose a novel method named GIDP to learn a Good Initialization and Inducing Descriptor Poseenhancing for Large-scale Place Recognition. In particular, an unsupervised momentum contrast point cloud pretraining module and a reranking-based descriptor post-enhancing module are proposed respectively in GIDP. The former aims at learning a good initialization for the point cloud encoding network before training the place recognition model, while the later aims at post-enhancing the predicted global descriptor through reranking at inference time. Extensive experiments on both indoor and outdoor datasets demonstrate that our method can achieve state-of-the-art performance using simple and general point cloud encoding backbones.