 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGeoLCR: Attention-based Geometric Loop Closure and Registration
Paper and Code
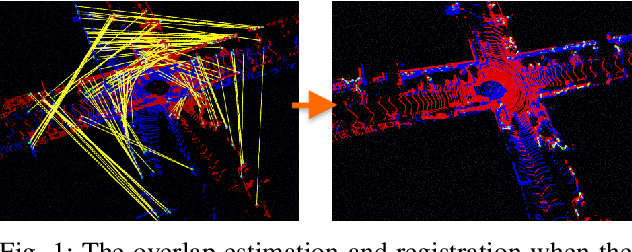
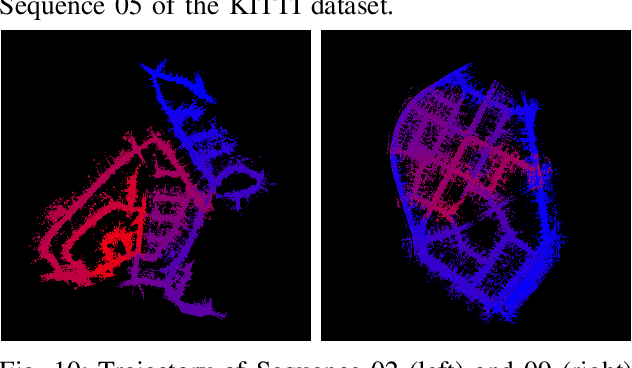
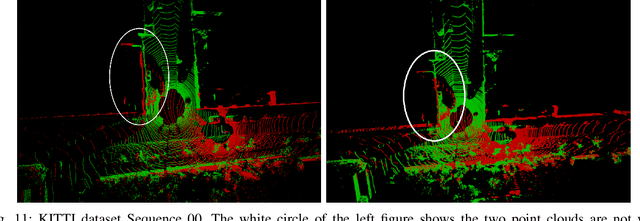
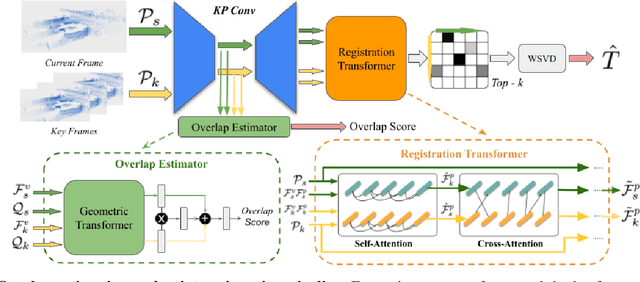
We present a novel algorithm for learning-based loop-closure for SLAM (simultaneous localization and mapping) applications. Our approach is designed for general 3D point cloud data, including those from lidar, and is used to prevent accumulated drift over time for autonomous driving. We voxelize the point clouds into coarse voxels and calculate the overlap to estimate if the vehicle drives in a loop. We perform point-level registration to compute the current pose accurately. We have evaluated our approach on well-known datasets KITTI, KITTI-360, Nuscenes, Complex Urban, NCLT, and MulRan. We show at most 2 times improvement in accuracy estimation of translation and rotation. On some challenging sequences, our method is the first approach that can obtain a 100% success rate.