 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGeoAdapt: Self-Supervised Test-Time Adaption in LiDAR Place Recognition Using Geometric Priors
Paper and Code
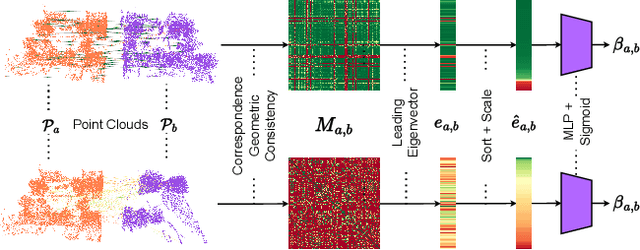
LiDAR place recognition approaches based on deep learning suffer a significant degradation in performance when there is a shift between the distribution of the training and testing datasets, with re-training often required to achieve top performance. However, obtaining accurate ground truth on new environments can be prohibitively expensive, especially in complex or GPS-deprived environments. To address this issue we propose GeoAdapt, which introduces a novel auxiliary classification head to generate pseudo-labels for re-training on unseen environments in a self-supervised manner. GeoAdapt uses geometric consistency as a prior to improve the robustness of our generated pseudo-labels against domain shift, improving the performance and reliability of our Test-Time Adaptation approach. Comprehensive experiments show that GeoAdapt significantly boosts place recognition performance across moderate to severe domain shifts, and is competitive with fully supervised test-time adaptation approaches. Our code will be available at https://github.com/csiro-robotics/GeoAdapt.