 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGenerative Multi-Agent Behavioral Cloning
Paper and Code
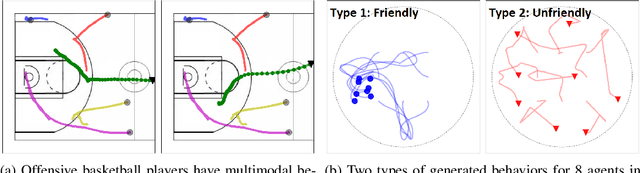
We propose and study the problem of generative multi-agent behavioral cloning, where the goal is to learn a generative, i.e., non-deterministic, multi-agent policy from pre-collected demonstration data. Building upon advances in deep generative models, we present a hierarchical policy framework that can tractably learn complex mappings from input states to distributions over multi-agent action spaces by introducing a hierarchy with macro-intent variables that encode long-term intent. In addition to synthetic settings, we show how to instantiate our framework to effectively model complex interactions between basketball players and generate realistic multi-agent trajectories of basketball gameplay over long time periods. We validate our approach using both quantitative and qualitative evaluations, including a user study comparison conducted with professional sports analysts.