 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGeneralized Planning: Non-Deterministic Abstractions and Trajectory Constraints
Paper and Code
Sep 26, 2019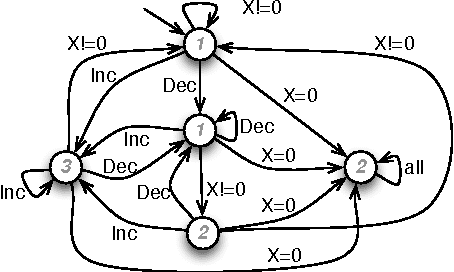
We study the characterization and computation of general policies for families of problems that share a structure characterized by a common reduction into a single abstract problem. Policies $\mu$ that solve the abstract problem P have been shown to solve all problems Q that reduce to P provided that $\mu$ terminates in Q. In this work, we shed light on why this termination condition is needed and how it can be removed. The key observation is that the abstract problem P captures the common structure among the concrete problems Q that is local (Markovian) but misses common structure that is global. We show how such global structure can be captured by means of trajectory constraints that in many cases can be expressed as LTL formulas, thus reducing generalized planning to LTL synthesis. Moreover, for a broad class of problems that involve integer variables that can be increased or decreased, trajectory constraints can be compiled away, reducing generalized planning to fully observable non-deterministic planning.