 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGeneral Flow as Foundation Affordance for Scalable Robot Learning
Paper and Code


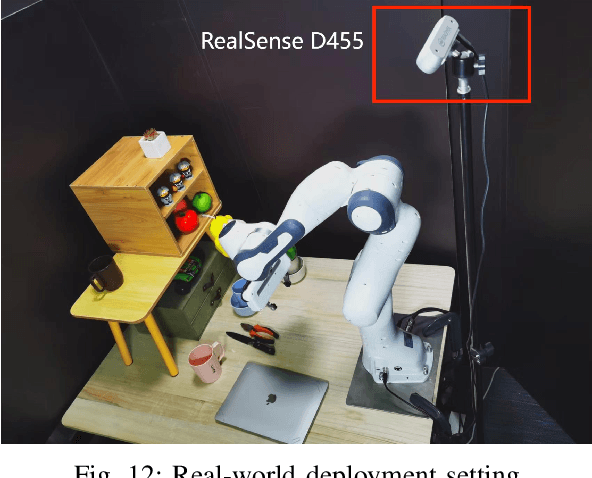

We address the challenge of acquiring real-world manipulation skills with a scalable framework.Inspired by the success of large-scale auto-regressive prediction in Large Language Models (LLMs), we hold the belief that identifying an appropriate prediction target capable of leveraging large-scale datasets is crucial for achieving efficient and universal learning. Therefore, we propose to utilize flow, which represents the future trajectories of 3D points on objects of interest, as an ideal prediction target in robot learning. To exploit scalable data resources, we turn our attention to cross-embodiment datasets. We develop, for the first time, a language-conditioned prediction model directly from large-scale RGBD human video datasets. Our predicted flow offers actionable geometric and physics guidance, thus facilitating stable zero-shot skill transfer in real-world scenarios.We deploy our method with a policy based on closed-loop flow prediction. Remarkably, without any additional training, our method achieves an impressive 81% success rate in human-to-robot skill transfer, covering 18 tasks in 6 scenes. Our framework features the following benefits: (1) scalability: leveraging cross-embodiment data resources; (2) universality: multiple object categories, including rigid, articulated, and soft bodies; (3) stable skill transfer: providing actionable guidance with a small inference domain-gap. These lead to a new pathway towards scalable general robot learning. Data, code, and model weights will be made publicly available.