 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGen-Swarms: Adapting Deep Generative Models to Swarms of Drones
Paper and Code
Aug 28, 2024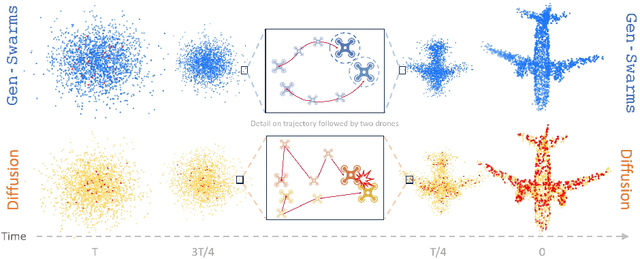
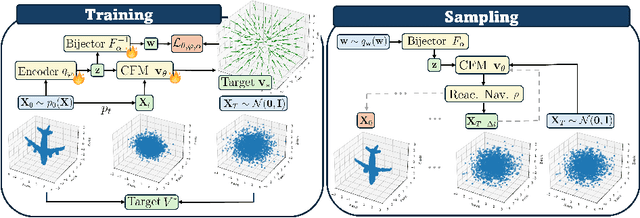
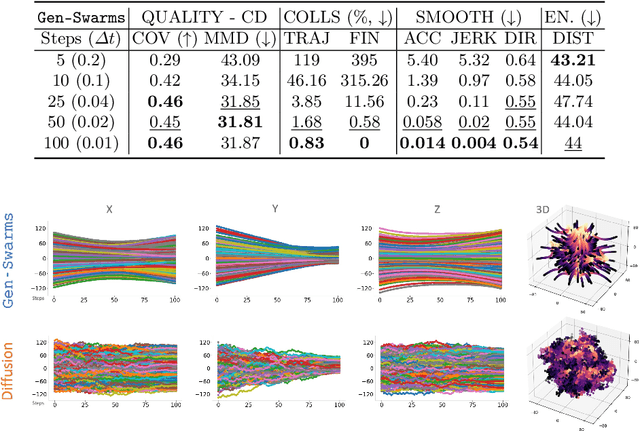
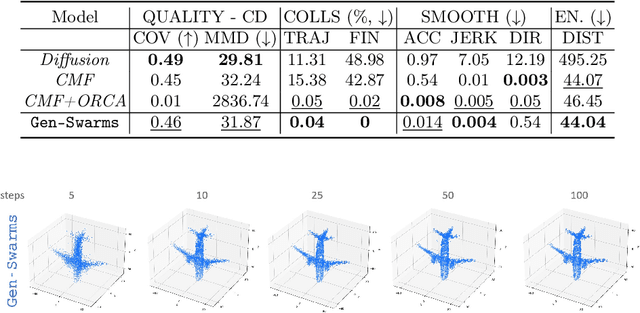
Gen-Swarms is an innovative method that leverages and combines the capabilities of deep generative models with reactive navigation algorithms to automate the creation of drone shows. Advancements in deep generative models, particularly diffusion models, have demonstrated remarkable effectiveness in generating high-quality 2D images. Building on this success, various works have extended diffusion models to 3D point cloud generation. In contrast, alternative generative models such as flow matching have been proposed, offering a simple and intuitive transition from noise to meaningful outputs. However, the application of flow matching models to 3D point cloud generation remains largely unexplored. Gen-Swarms adapts these models to automatically generate drone shows. Existing 3D point cloud generative models create point trajectories which are impractical for drone swarms. In contrast, our method not only generates accurate 3D shapes but also guides the swarm motion, producing smooth trajectories and accounting for potential collisions through a reactive navigation algorithm incorporated into the sampling process. For example, when given a text category like Airplane, Gen-Swarms can rapidly and continuously generate numerous variations of 3D airplane shapes. Our experiments demonstrate that this approach is particularly well-suited for drone shows, providing feasible trajectories, creating representative final shapes, and significantly enhancing the overall performance of drone show generation.