Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGaussian-SLAM: Photo-realistic Dense SLAM with Gaussian Splatting
Paper and Code

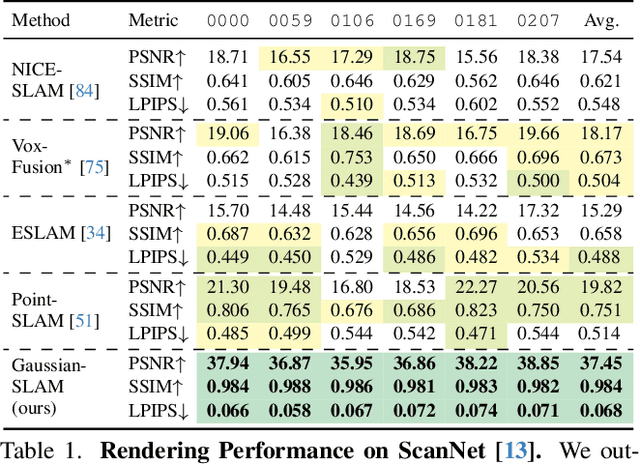


We present a new dense simultaneous localization and mapping (SLAM) method that uses Gaussian splats as a scene representation. The new representation enables interactive-time reconstruction and photo-realistic rendering of real-world and synthetic scenes. We propose novel strategies for seeding and optimizing Gaussian splats to extend their use from multiview offline scenarios to sequential monocular RGBD input data setups. In addition, we extend Gaussian splats to encode geometry and experiment with tracking against this scene representation. Our method achieves state-of-the-art rendering quality on both real-world and synthetic datasets while being competitive in reconstruction performance and runtime.
View paper on